

Guide de sélection du servo-moteur : comment choisir le bon moteur pour un contrôle de mouvement précis
Choisir le servomoteur adapté à votre application peut faire la différence entre un système qui offre des performances précises et fiables et un système qui souffre d’erreurs de positionnement, de surchauffe ou de défaillance prématurée. Que vous conceviez un bras robotique, une machine CNC, une ligne d’emballage automatisée ou un dispositif médical, comprendre les paramètres et les critères de sélection des servomoteurs est essentiel aussi bien pour les ingénieurs que pour les équipes achats.
Ce guide vous guide à travers les fondamentaux techniques, les paramètres de sélection des clés, les compromis de performance et les considérations de conception nécessaires pour spécifier et trouver le servomoteur optimal adapté à votre application de contrôle de mouvement.
Table des matières
- Qu’est-ce qu’un servo-moteur et comment fonctionne-t-il ?
- Paramètres techniques clés pour la sélection du servo-moteur
- [Comment calculer le couple et l’inertie requis] (#3-comment-calculer-couple-et-inertie requis)
- [Servomoteur vs. Moteur pas à pas : Quand utiliser lequel] (#4-servo-moteur-vs-moteur-pas pas à pas-quand-utiliser-lequel)
- [Considérations de conception et pièges courants] (#5-considérations-et-pièges-courants)
- [Considérations sur la chaîne d’approvisionnement et l’approvisionnement] (#6-Considérations de la chaîne d’approvisionnement et des approvisionnements)
- FAQ
- Conclusion
1. Qu’est-ce qu’un servomoteur et comment fonctionne-t-il ?
Un servomoteur est un actionneur rotatif ou linéaire qui permet un contrôle précis de la position angulaire ou linéaire, de la vitesse et de l’accélération. Contrairement aux moteurs standards qui tournent simplement sous tension, les servomoteurs intègrent un dispositif de rétroaction — généralement un encodeur ou un résolveur — qui rapporte en continu la position réelle de l’arbre au contrôleur.
Cette architecture de contrôle en boucle fermée permet au système servo de détecter et de corriger les erreurs de positionnement en temps réel. Lorsque le contrôleur envoie une commande de position, le lecteur compare la position commandée avec le retour de l’encodeur. Toute déviation génère un signal d’erreur que le variateur utilise pour ajuster le courant du moteur, amenant l’arbre à la position cible exacte.
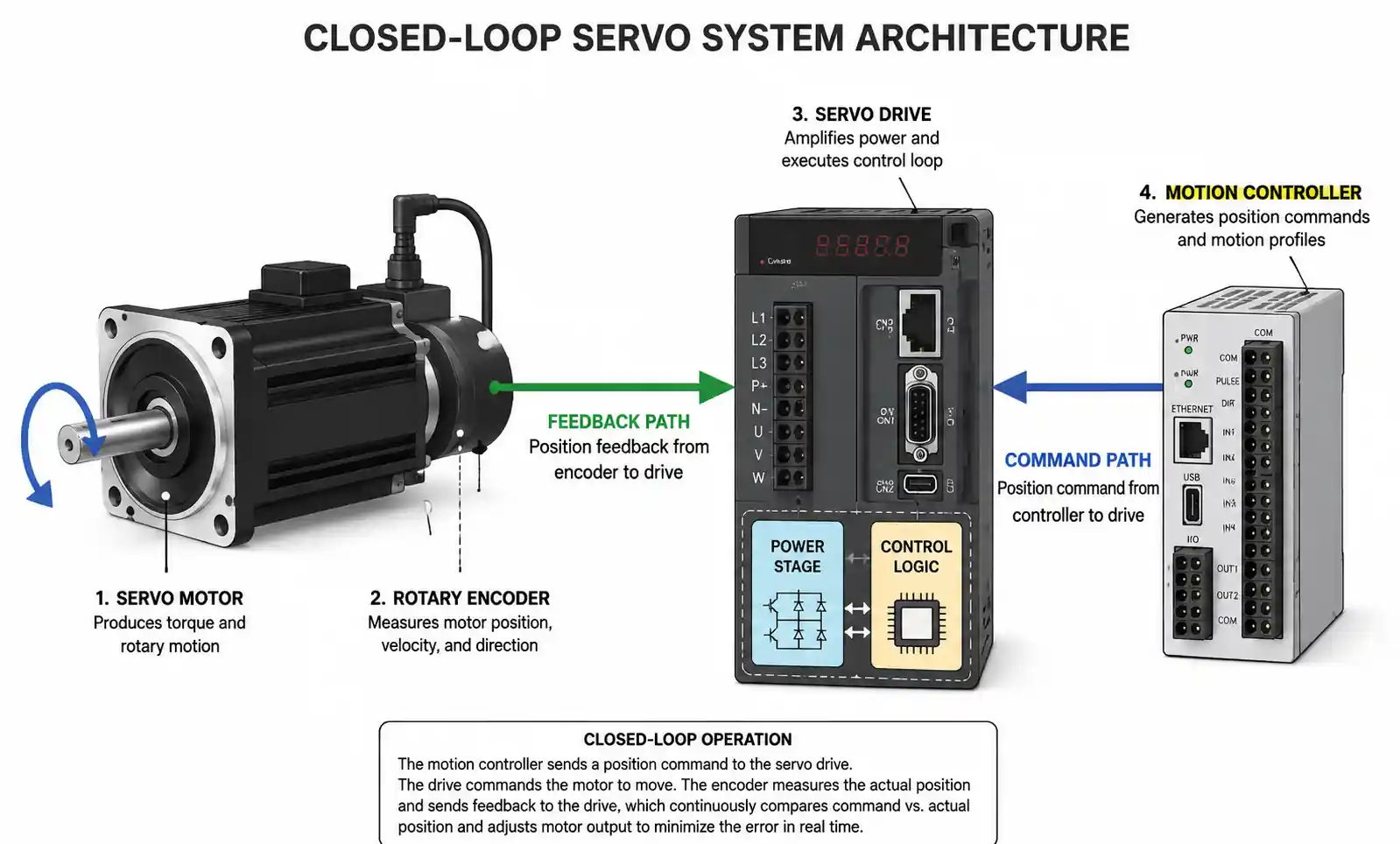
Les composants principaux d’un système servo incluent le moteur lui-même, un encodeur ou résolveur pour le retour de position, un servo drive qui interprète les commandes et régule le courant, ainsi qu’un contrôleur de mouvement qui génère des profils de trajectoire. Dans les applications industrielles, les servomoteurs sont appréciés pour leur capacité à exécuter des profils de mouvement complexes avec une forte accélération, des temps de tassage rapides et une précision de positionnement répétable jusqu’à l’arc seconde.
Les servomoteurs sont disponibles en variantes AC et DC. Les servomoteurs à courant alternatif dominent l’automatisation industrielle en raison de leur densité de puissance plus élevée, de meilleures performances thermiques et de leur conception sans balais qui élimine la maintenance. Les servomoteurs DC restent courants dans les applications à faible consommation et les systèmes anciens, bien que les servomoteurs DC sans balais (BLDC) aient largement remplacé les conceptions balais dans les nouveaux équipements.
2. Paramètres techniques clés pour la sélection du servo-moteur
Choisir le bon servomoteur nécessite de comprendre comment chaque spécification impacte les performances, la fiabilité et le coût de votre application. Les paramètres suivants constituent la base de toute décision de sélection de servo-moteur.
Spécifications de couple
Le couple nominal (couple continu) définit le couple maximal que le moteur peut délivrer en continu sans surchauffe. C’est le couple disponible pour un fonctionnement soutenu et il devrait dépasser la moyenne requise de couple de votre application avec une marge suffisante. Le couple maximal (couple maximal) représente le couple de courte durée disponible pour l’accélération, la décélération ou la surmontation de pics de charge instantanés, généralement 2 à 3 fois le couple nominal.
Lors de la dimension pour le couple, il faut tenir compte des pertes par friction, des charges gravitationnelles (pour les axes verticaux), du couple d’accélération et d’un facteur de sécurité de 1,2 à 1,5. Sous-dimensionner le couple entraîne des manquements, des erreurs de positionnement et des défauts de transmission ; Surdimensionner gaspille du capital et de l’espace de panneaux.
Plage de vitesse
La vitesse nominale indique la vitesse continue maximale du moteur au couple nominal. Au-delà de cette vitesse, le couple disponible diminue en raison des limitations de contre-force électromotérieuse dans les servomoteurs AC. La vitesse maximale définit la limite absolue, bien que le couple puisse être considérablement réduit à ce stade.
Pour les applications nécessitant un couple constant sur une large plage de vitesses, considérez les moteurs avec une capacité d’affaiblissement du champ ou de réduction de boîte de vitesses. Les applications à haute vitesse exigent une attention particulière à l’équilibre mécanique, au choix des roulements et à la résolution des encodeurs.
Inertie et rapport d’inertie
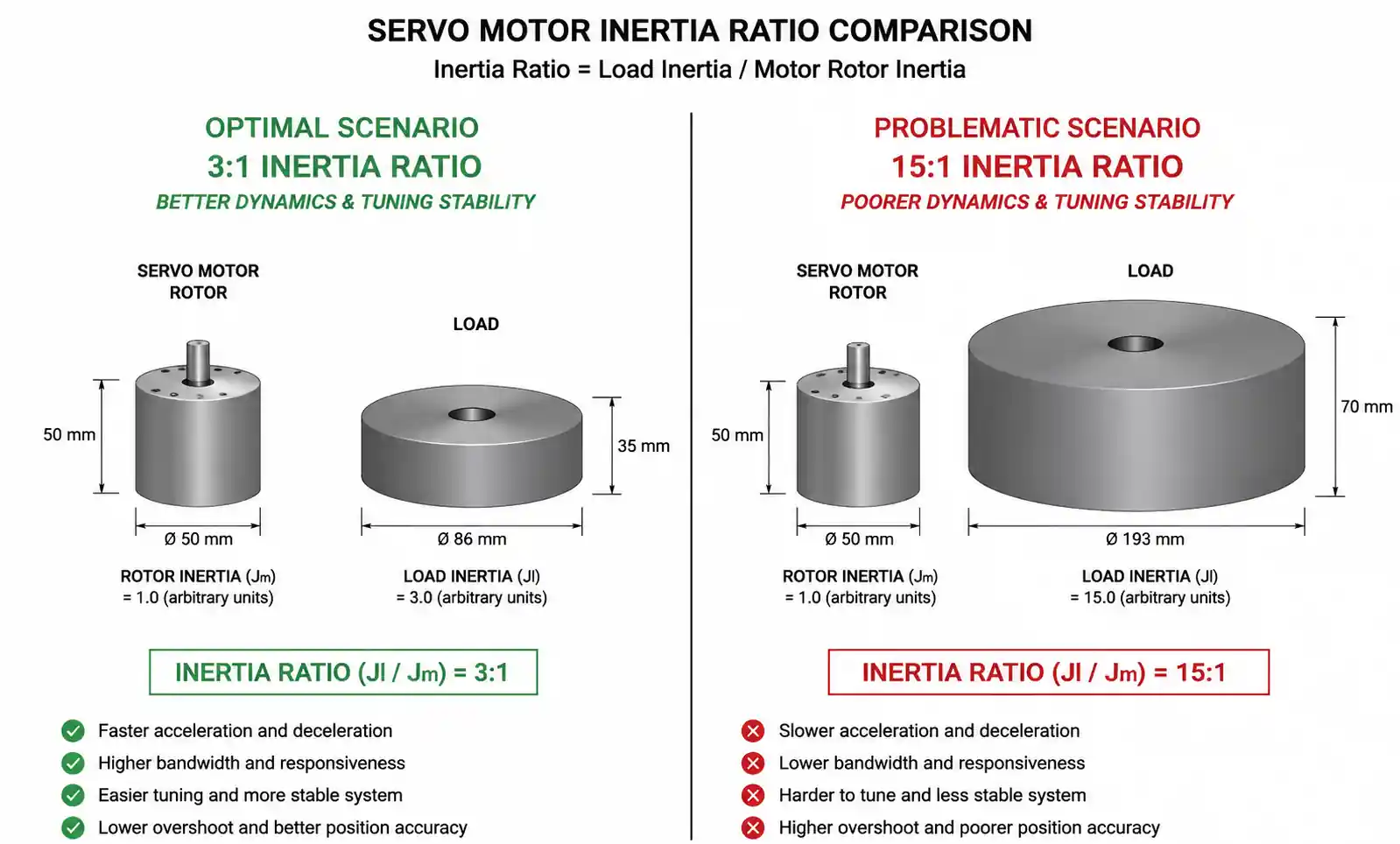
L’inertie du moteur (inertie du rotor) mesure la résistance du rotor à l’accélération angulaire. L’inertie de charge représente l’inertie réfléchie de tous les composants mobiles attachés à l’arbre moteur. Le rapport d’inertie (inertie de charge divisée par l’inertie du moteur) affecte de manière critique la dynamique du système et la stabilité du réglage.
La pratique traditionnelle de conception vise un rapport d’inertie entre 1:1 et 10:1 pour un réglage et une réponse optimaux. Des ratios supérieurs à 10:1 peuvent entraîner une réponse lente, un dépassement et des difficultés à obtenir un réglage stable. Les servo-entraînements modernes avec des algorithmes de réglage avancés peuvent gérer des rapports plus élevés, mais des rapports plus faibles offrent généralement de meilleures performances.
Résolution de l’encodeur
La résolution de l’encodeur détermine la précision du positionnement et la précision du feedback. Les types d’encodeurs courants incluent les encodeurs incrémentaux (mesurant la position relative via des impulsions en quadrature), les encodeurs absolus (indiquant la position absolue même après coupure de puissance) et les résolveurs (dispositifs analogiques à forte immunité au bruit). La résolution est spécifiée en comptes par révolution (CPR) ou en bits pour les encodeurs absolus.
Une résolution plus élevée améliore la précision du positionnement et permet un mouvement plus fluide à basse vitesse, mais augmente les coûts du système et les besoins en traitement des données. Pour les applications de positionnement de précision, les encodeurs absolus de 17 bits à 23 bits sont courants ; pour des tâches moins exigeantes, les encodeurs de 13 bits à 16 bits suffisent.
Spécifications électriques
La tension et le courant nominals définissent le point de fonctionnement électrique du moteur et déterminent la compatibilité du variateur. Les tensions industrielles courantes incluent les monophasés 230VAC et les triphasés 400VAC pour les servomoteurs AC. La constante moteur (Kt) relie le courant au couple, tandis que la constante de tension (Ke) relie la vitesse à la contre-EMF.
Les caractéristiques thermiques incluent la résistance thermique et la constante de temps thermique, qui déterminent la rapidité avec laquelle le moteur chauffe sous charge et refroidit pendant les périodes de ralenti. Une bonne gestion thermique est essentielle pour les applications à fonctionnement continu.
| Paramètre | Plage typique | Critère de sélection |
|---|---|---|
| Couple nominal | 0,05 Nm – 100 Nm+ | Doit dépasser le couple moyen de charge de 20 à 50 % |
| Torque de pointe | 2x – 3x couple nominal | Doit gérer les pics d’accélération et de décélération |
| Vitesse nominale | 1000 – 6000 tr/min | Devrait dépasser la vitesse maximale d’application de 10 à 20 % |
| Rapport d’inertie | 1:1 – 10:1 (optimal) | Des rapports plus bas améliorent l’accordage et la réponse |
| Résolution de l’encodeur | 13 bits – 23 bits | Résolution plus élevée pour un positionnement précis |
| Tension | 230 VAC / 400 VAC | Doit correspondre à l’alimentation disponible |
Après avoir examiné ce tableau, vérifiez que le moteur choisi offre une marge de couple suffisante à la vitesse maximale requise. De nombreuses applications échouent car les ingénieurs dimensionnent pour le couple maximal sans vérifier si ce couple est disponible à la vitesse de fonctionnement.
3. Comment calculer le couple et l’inertie requis
Des calculs précis du couple et de l’inertie évitent la sous-dimensionnement (entraînant des erreurs de positionnement et des défauts d’entraînement) et la surdimensionnement (gaspillage de capital et complique le réglage). La méthodologie suivante s’applique à la majorité des applications de servo rotatif.
Calcul du couple
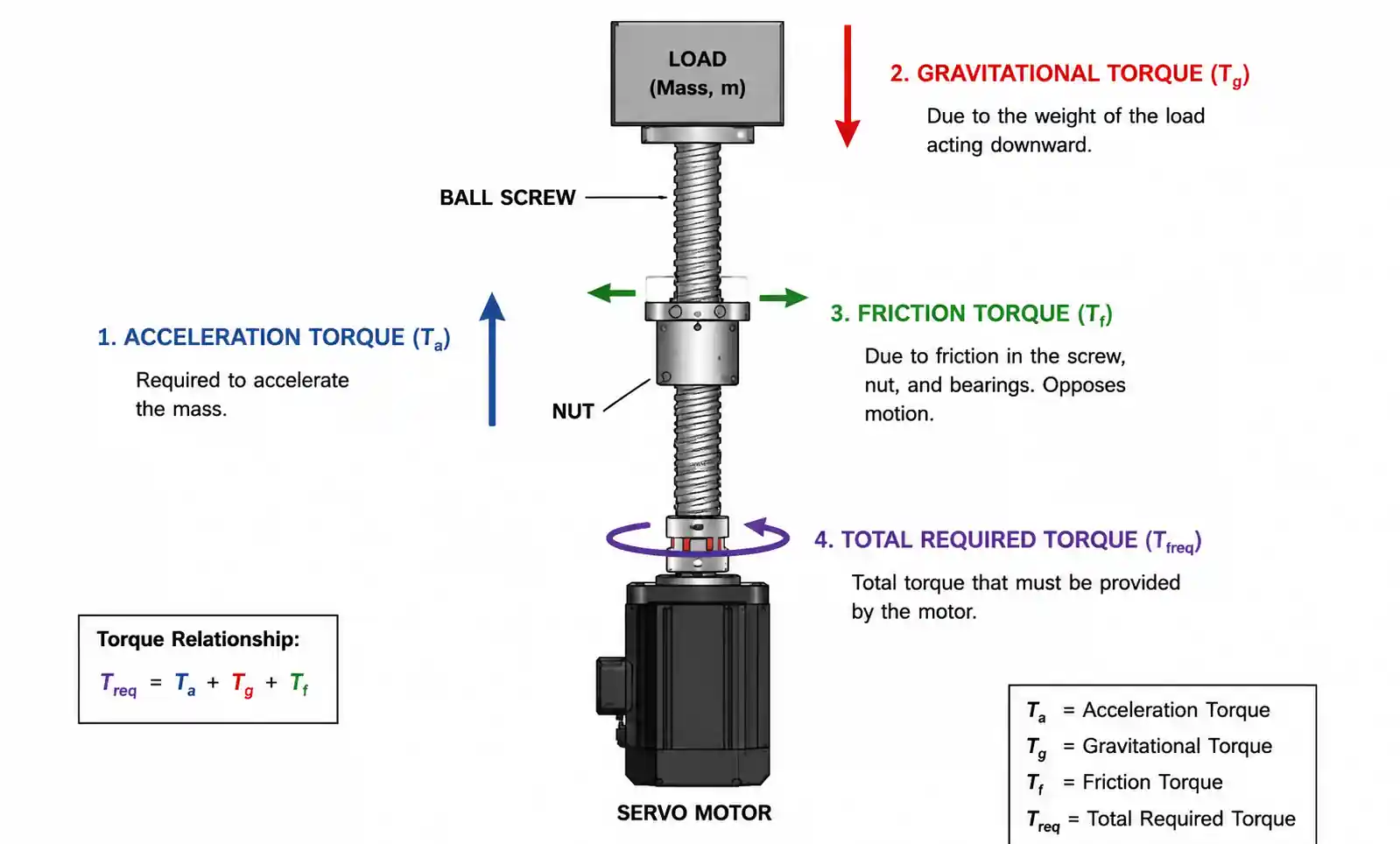
Le couple total requis se compose de quatre composantes : le couple d’accélération, le couple de friction, le couple gravitationnel (pour les axes verticaux ou inclinés) et le couple de procédé (forces de coupe, résistance du matériau, etc.).
Le couple d’accélération est calculé comme : T_accel = J_total × α, où J_total est l’inertie totale du système (moteur plus charge) et α est l’accélération angulaire en rad/s². Pour les axes linéaires à vis à billes ou à courroie, la masse linéaire et l’accélération sont réfléchies à l’arbre moteur en utilisant l’avantage mécanique.
Le couple de friction inclut la friction des roulements, la traînée des joints et la friction par glissement (glissement de la friction). Pour les vis à billes, le couple de friction est généralement de 5 à 10 % du couple gravitationnel et du procédé. Pour les entraînements par courroie, les pertes par frottement varient de 15 à 30 % selon la tension de la courroie et la qualité des roulements de poulie.
Le couple gravitationnel pour les axes verticaux est : T_grav = m × g × r, où m est la masse de charge, g est l’accélération gravitationnelle (9,81 m/s²), et r est le rayon effectif (par exemple, la vis divisée par 2π pour les vis à billes).
Le couple de procédé dépend de l’application — forces de coupe dans les machines CNC, tension des matériaux lors de la manipulation de la toile ou force d’adhérence en robotique. Consultez les données d’ingénierie spécifiques à l’application pour ces valeurs.
Additionnez les quatre composants et appliquez un facteur de sécurité de 1,2 à 1,5 pour tenir compte des incertitudes du modèle, des tolérances de fabrication et du vieillissement.
Calcul d’inertie
Calculer l’inertie réfléchie de chaque composante mobile à l’aide de formules standard : pour les masses cylindriques tournantes, J = 0,5 × m × r² ; pour les masses linéaires passant par une vis, J = m × (plomb / 2π)² ; pour les masses linéaires entraînées par courroie, J = m × r² où r est le rayon de la poulie.
Additionnez toutes les inerties de charge réfléchies et comparez à celle du rotor du moteur pour déterminer le rapport d’inertie. Si le rapport dépasse 10:1, envisagez d’utiliser une boîte de vitesses pour réduire l’inertie réfléchie de la charge, ou choisissez un moteur plus grand avec une inertie du rotor plus élevée.
4. Servomoteur vs. moteur pas à pas : quand utiliser lequel
Les servomoteurs et moteurs pas à pas offrent tous deux un contrôle précis de la position, mais ils fonctionnent selon des principes fondamentalement différents et répondent à des besoins d’application variés. Comprendre les compromis aide les ingénieurs à faire des choix rentables.
Architecture de contrôle
Les moteurs pas à pas fonctionnent en boucle ouverte : le contrôleur envoie des impulsions à pas, et le moteur tourne d’un angle fixe par impulsion sans retour de retour. Cette simplicité réduit le coût et la complexité du système, mais ne garantit pas que le moteur ait effectivement atteint la position commandée. Si le moteur calle ou saute des étapes à cause d’une charge excessive, le contrôleur n’a aucun moyen de détecter l’erreur.
Les servomoteurs fonctionnent en boucle fermée : l’encodeur rapporte en continu la position réelle, et le commandement corrige toute déviation entre la position commandée et la position réelle. Ce retour permet de meilleures performances mais nécessite des entraînements et des réglages plus sophistiqués.
Comparaison des performances
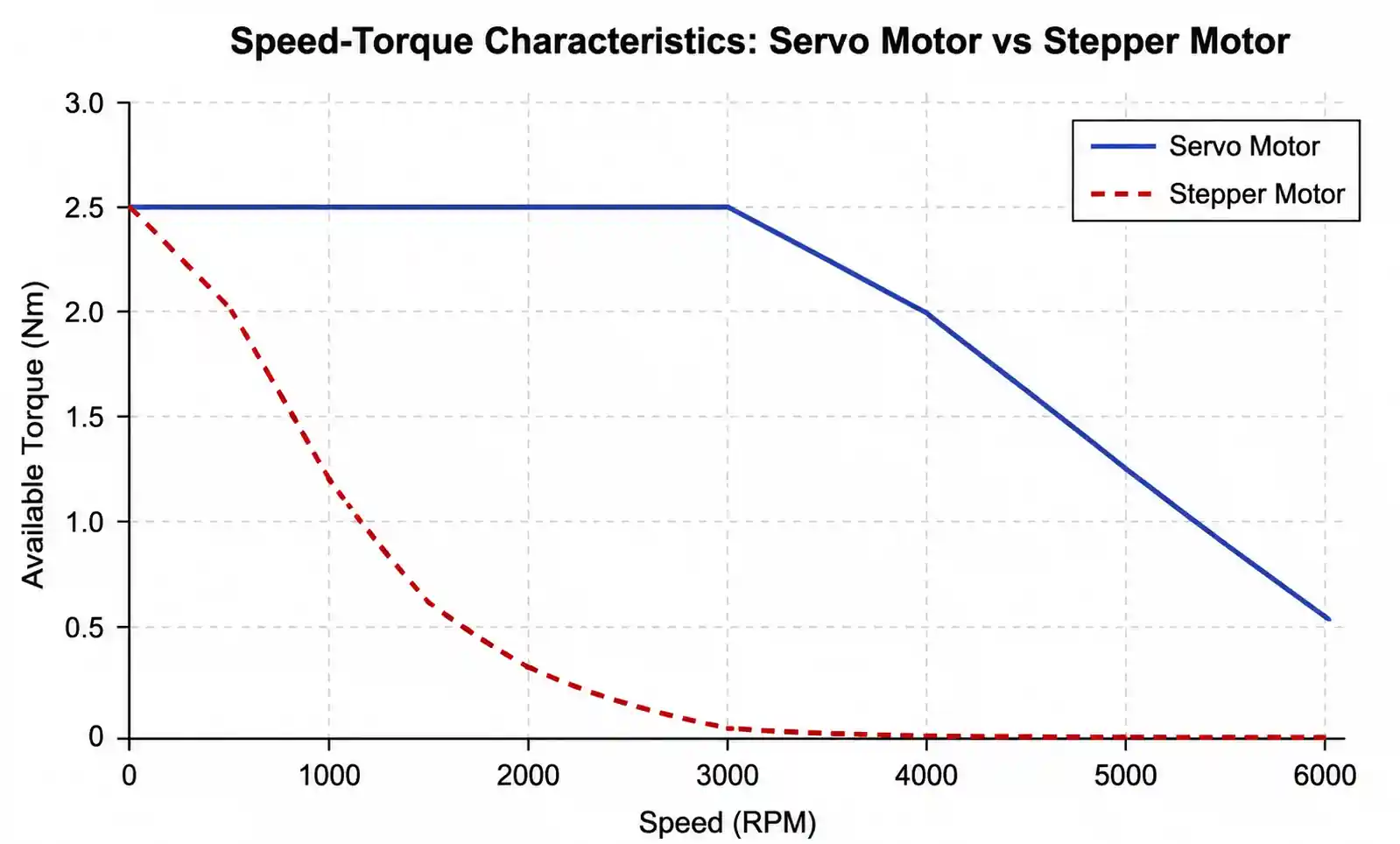
Les servomoteurs offrent une vitesse et une accélération nettement supérieures à celles des moteurs pas à pas. Alors que les moteurs pas à pas fonctionnent généralement en dessous de 2000 tr/min et perdent rapidement leur couple à haute vitesse, les servomoteurs maintiennent un couple élevé sur toute leur plage de vitesses et peuvent atteindre 6000 tr/min ou plus. Cela fait des servos le choix évident pour les applications à haut débit et les machines à cycles rapides.
Le rapport couple/inertie favorise les servomoteurs, ce qui permet une accélération plus rapide et des temps de cycle plus courts. Les servomoteurs offrent également un fonctionnement fluide et silencieux sur toute la plage de vitesses, tandis que les moteurs pas à pas peuvent présenter des résonances et des vibrations à certaines vitesses, sauf réglages avec micro-pas ou amortisseurs.
L’efficacité énergétique est un autre avantage du servo. Les steppers consomment tout le courant en continu pour maintenir le couple de maintien, même lorsqu’ils sont à l’arrêt. Les servomoteurs ne consomment le courant que si nécessaire pour maintenir la position ou déplacer la charge, réduisant ainsi la consommation d’énergie et la production de chaleur dans la cabine de contrôle.
Coût et complexité
Les moteurs pas à pas coûtent nettement moins cher que les servomoteurs de taille comparable, et les entraînements pas à pas sont plus simples et moins coûteux que les servo-entraînements. Pour les applications à faible performance avec des charges prévisibles et des exigences de vitesse modestes, les steppers offrent un avantage de coût attractif.
Les systèmes servo nécessitent un réglage des gains PID et des limites de vitesse/accélération pour obtenir des performances stables et réactives. Les systèmes pas à pas ne nécessitent pas d’accordage mais peuvent nécessiter un micro-pas et un amortissement par résonance pour un fonctionnement fluide.
| Critères | Moteur pas à pas | Servo Moteur |
|---|---|---|
| Méthode de contrôle | Boucle ouverte (sans rétroaction) | Boucle fermée (retour d’encodeur) |
| Plage de vitesse | Jusqu’à 2000 tr/min typique | Jusqu’à 6000+ tr/min |
| Couple à haute vitesse | Chute nettement au-dessus de 1000 tr/min | Maintient le couple à la vitesse nominale |
| Précision du positionnement | ±angle de pas à 5 % (sans correction d’erreurs) | Secondes d’arc avec retour d’information |
| Accélération | Modéré (limité par l’inertie) | Élevé (meilleur rapport couple/inertie) |
| Efficacité énergétique | Lower (courant continu) | Plus haut (courant à la demande) |
| Coût initial | Lower | Plus haut |
| Accordage requis | Non | Oui (gains de PID) |
| Applications typiques | Imprimantes 3D, positionnement basique, automatisation à basse vitesse | Machines CNC, robotique, emballage à grande vitesse, assemblage de précision |
Le facteur clé de décision est constitué des exigences de performance des applications. Si votre application exige une grande vitesse, une accélération rapide, une gestion dynamique des charges ou une précision de positionnement vérifiée, les servomoteurs justifient leur coût plus élevé. Si les charges sont prévisibles, les vitesses modestes et le coût critique, les moteurs pas à pas offrent des performances adéquates à un investissement moindre.
5. Considérations de conception et pièges courants
Une bonne intégration des servomoteurs nécessite une attention particulière aux détails de conception électrique, mécanique et thermique. Les considérations suivantes aident à éviter les erreurs de conception les plus courantes qui conduisent à de mauvaises performances ou à une défaillance prématurée.
Intégration mécanique
Un choix approprié de l’accouplement d’arbre est crucial. Les accouplements rigides transmettent un couple et une précision de positionnement maximales, mais nécessitent un alignement précis pour éviter les dommages des roulements. Les accouplements flexibles tolèrent de légers désalignements mais introduisent un contrecoup et une conformité qui dégradent la performance de positionnement. Pour des applications de précision, utilisez des soufflets ou des accouplements à disque avec un jeu minimal et une grande rigidité en torsion.
La rigidité du montage affecte la résonance du système et la précision du positionnement. Montez des servomoteurs sur des structures rigides à l’aide de fixations correctement serrées. Évitez les charges en porte-à-faux qui créent des charges secondaires sur les roulements moteur, réduisant ainsi la durée de vie des roulements.
Lorsque vous utilisez des boîtes de vitesses, choisissez des réducteurs planétaires ou harmoniques de haute qualité avec un minimum de jeu de jeu. Le jeu de jeu dans la transmission se traduit directement par une erreur de positionnement. Pour les applications servo, spécifier des boîtes de vitesses avec un jeu inférieur à 5 minutes d’arc.
Câblage électrique et mise à la terre
Un bon passage des câbles empêche les interférences électromagnétiques (EMI) qui peuvent corrompre les signaux des encodeurs et provoquer des erreurs ou des défauts de positionnement. Faites passer les câbles d’alimentation des moteurs et les câbles de signal de l’encodeur dans des conduits séparés. Utilisez un câble à paires torsadées blindées pour les signaux de l’encodeur et connectez le blindage à la masse à une extrémité uniquement pour éviter les boucles de terre.
Assurez-vous d’avoir un calibre de fil suffisant pour les câbles d’alimentation du moteur afin de minimiser la chute de tension, surtout pour les longs passages de câbles. Une chute de tension excessive réduit le couple disponible et peut provoquer des défauts de sous-tension d’entraînement. Consultez les spécifications du fabricant du lecteur pour la longueur maximale du câble et la largeur minimale du câble.
Installez des servo-entraînements dans des boîtiers climatisés avec ventilation adéquate ou refroidissement forcé. La plupart des servo-entraînements sont conçus pour des températures ambiantes allant jusqu’à 40-45°C. Fonctionner au-dessus de cette plage déclenche des déclassements thermiques ou des arrêts de protection.
Gestion thermique
Les servomoteurs génèrent de la chaleur pendant le fonctionnement, et une température excessive raccourcit la durée de vie de l’isolation des enroulements et la durée de vie de la graisse des roulements. La plupart des servomoteurs industriels ont une isolation de classe F (155°C) ou classe H (180°C), mais devraient fonctionner bien en dessous de ces limites pour une longue durée de service.
Le cycle de travail affecte la charge thermique. Un moteur capable de délivrer 10 Nm en continu peut supporter un couple maximal de 20 Nm pendant de courtes durées. Calculez le couple RMS pour votre cycle de service et vérifiez qu’il reste en dessous de la capacité continue du moteur. De nombreux servo-entraînements incluent des modèles thermiques qui surveillent la température des moteurs et empêchent la surchauffe.
Pour les applications à haute température ambiante ou à cycles continus à haute intensité, pensez aux moteurs avec refroidissement forcé (ventilateur externe) ou refroidissement liquide.
Erreurs de conception courantes
Ignorer le rapport d’inertie lors de la sélection moteur entraîne des difficultés d’accordage et une réponse lente. Calculez toujours l’inertie de charge et vérifiez que le rapport d’inertie se situe dans la plage acceptable, idéalement en dessous de 5:1 pour des applications exigeantes.
Ne pas prendre en compte l’inertie réfléchie par les engrenages ou les vis peut entraîner des moteurs sous-dimensionnés. Une masse linéaire de 10 kg sur une vis à billes de 5 mm/régime se reflète à environ 0,00006 kg·m² à l’arbre moteur, ce qui peut sembler petit mais s’additionne rapidement avec plusieurs axes ou des masses plus grandes.
Spécifier le couple maximal sans vérifier les courbes vitesse-couple est une autre erreur fréquente. Un moteur peut fournir un couple maximal de 20 Nm, mais seulement à basse vitesse. À 3000 tr/min, le couple disponible peut tomber à 8 Nm. Vérifiez toujours que le couple requis est disponible à la vitesse maximale de fonctionnement.
Négliger les limites de longueur de câble peut corrompre le retour de l’encodeur ou provoquer des chutes de tension. Suivez les spécifications du fabricant du lecteur pour la longueur maximale du câble moteur, généralement 25 à 50 mètres pour les variateurs standards.
6. Considérations sur la chaîne d’approvisionnement et l’approvisionnement
Au-delà des spécifications techniques, les facteurs d’approvisionnement pratiques influencent les délais du projet, les coûts et la maintenabilité à long terme. Les ingénieurs et les équipes achats doivent évaluer ces facteurs dès le début du processus de sélection.
Délais et disponibilité
Les servomoteurs standards des grands fabricants (Siemens, Yaskawa, Mitsubishi, Kollmorgen, Fanuc) ont généralement des délais de livraison de 4 à 12 semaines selon la taille et la configuration. Les moteurs sur mesure avec des enroulements, configurations de montage ou types d’encodeurs spéciaux peuvent prolonger les délais de livraison à 16 à 20 semaines.
Lors de perturbations de la chaîne d’approvisionnement ou de périodes de forte demande, les délais de livraison peuvent s’allonger considérablement. Pour les projets critiques, envisagez de faire un double approvisionnement auprès de plusieurs fabricants ou de maintenir un inventaire stratégique de composants à long termine.
De nombreux distributeurs (Digi-Key, Mouser, Allied Electronics) proposent des modèles populaires de servomoteurs pour une livraison immédiate, bien que la sélection soit limitée par rapport à la commande directe auprès des fabricants. Pour le prototypage et le développement, le stock des distributeurs accélère les plannings.
Certifications et conformité
Les servomoteurs industriels portent généralement la marque CE pour les marchés européens et la reconnaissance UL pour les marchés nord-américains. Pour des applications spécialisées, vérifiez les certifications supplémentaires :
- AEC-Q200 ou équivalent pour les applications automobiles nécessitant une plage de températures et une résistance aux vibrations étendues
- IEC 60601 pour les applications des dispositifs médicaux
- ATEX ou IECEx pour environnements à atmosphère explosive
- Classements IP (IP54, IP65, IP67) pour les installations lavables ou extérieures
L’absence de certifications peut retarder le lancement des produits ou empêcher l’entrée sur le marché. Vérifiez les exigences de certification à l’avance et sélectionnez les moteurs avec les approbations appropriées.
Coût total de possession
Le coût initial du moteur ne représente qu’une partie de l’équation du coût total. Considérez :
- Coût de transmission : les moteurs haute performance peuvent nécessiter des disques plus coûteux avec des fonctionnalités avancées
- Coût énergétique : des moteurs plus efficaces réduisent les coûts d’exploitation sur toute la durée de vie de l’équipement
- Coût d’entretien : les servomoteurs sans balais nécessitent un entretien minimal comparé aux moteurs à courant continu à balais
- Disponibilité des pièces détachées : les moteurs des grands constructeurs offrent un meilleur support des pièces à long terme
Pour les constructions d’équipements à grand volume, négociez la tarification en volume et envisagez de standardiser une seule famille de moteurs afin de réduire la complexité des stocks et d’améliorer la familiarité des techniciens.
| Facteur d’approvisionnement | Option à faible coût | Option haute performance |
|---|---|---|
| Délai d’exécution | 4-8 semaines (modèles standards) | 12-20 semaines (spécifications personnalisées) |
| Disponibilité | Stock distributeur disponible | Fabriqué sur commande |
| Certifications | CE, UL basic | AEC-Q, ATEX, IECEx, médical |
| Classification IP | IP54 (industrielle standard) | IP65, IP67 (lavage, extérieur) |
| Fourchette de prix (exemple 1 Nm) | 200-400 $ | 600-1200+ $ |
| Efficacité énergétique | 80-85 % typique | 90-94 % (conception haute efficacité) |
| Type d’encodeur | Incrementale (coût réduit) | Multi-tours absolus (premium) |
Pour les produits commerciaux, équilibrez le coût initial avec les exigences de performance et le coût total de possession. Pour les applications critiques, privilégiez la fiabilité, le support et la disponibilité à long terme plutôt que le prix d’achat le plus bas.
7. FAQ
Quelle est la différence entre les servomoteurs AC et les servomoteurs DC ?
Les servomoteurs à courant alternatif utilisent une alimentation triphasée et emploient généralement des conceptions synchrones à aimant permanent (PMSM) ou sans balais en courant continu (BLDC). Ils offrent une densité de puissance plus élevée, de meilleures performances thermiques et un fonctionnement sans entretien grâce à l’absence de balais. Les servomoteurs DC utilisent des conceptions à courant continu à balais ou sans balais et sont plus simples à contrôler, mais nécessitent un remplacement périodique des balais dans les variantes balais. Pour les nouvelles conceptions industrielles, les servomoteurs à courant alternatif sont le choix standard.
Comment calculer le couple requis d’un servomoteur pour une application de vis à billes ?
Calculez le couple total comme la somme du couple d’accélération, du couple de friction et du couple gravitationnel (pour les axes verticaux). Le couple d’accélération est T = J_total × α. Le couple de friction pour les vis à billes est d’environ 5 à 10 % de la charge gravitationnelle. Le couple gravitationnel pour le mouvement vertical est T = m × g × (plomb/2π). Réfléchissez toutes les forces et masses linéaires à l’arbre moteur en utilisant la vis de vis, puis ajoutez un facteur de sécurité de 20 à 50 %.
Quel rapport d’inertie dois-je viser lors du choix d’un servomoteur ?
La pratique traditionnelle de conception recommande des rapports d’inertie entre 1:1 et 10:1, avec des rapports plus faibles offrant une meilleure réponse dynamique et un réglage plus facile. Les servo-entraînements modernes avec réglage adaptatif peuvent gérer des rapports allant jusqu’à 30:1 ou plus, mais l’accordage devient plus complexe et la réponse du système se dégrade. Pour les applications exigeantes nécessitant une accélération rapide et un positionnement précis, les rapports cibles sont inférieurs à 5:1.
Puis-je utiliser un servomoteur dans un environnement sous vide ou en salle blanche ?
Les servomoteurs standards utilisent des roulements lubrifiés à la graisse qui dégazent en vide et peuvent contenir des particules inadaptées aux salles blanches. Pour les applications sous vide, spécifiez des moteurs avec des roulements lubrifiés à sec ou magnétiques. Pour les salles blanches, sélectionnez des moteurs avec boîtiers scellés (IP65 ou supérieur) et des matériaux compatibles en salle blanche. Certains fabricants proposent des moteurs spécialisés conçus spécifiquement pour ces environnements.
Combien de temps durent généralement les servomoteurs ?
La durée de vie du servomoteur est principalement limitée par la durée de vie des roulements et la dégradation de l’isolation des enroulements. Dans des conditions normales de fonctionnement (charge appropriée, température ambiante appropriée, environnement propre), la durée de vie des roulements du servomoteur est généralement de 20 000 à 30 000 heures de fonctionnement. La durée de vie de l’isolation des enroulements dépend de la température de fonctionnement ; Les moteurs fonctionnant à la température nominale peuvent durer 40 000+ heures. Fonctionner en dessous de la température nominale prolonge considérablement la durée de vie de l’isolation selon l’équation d’Arrhenius.
Quelle est la signification de la constante moteur (Kt) et de la constante de tension (Ke) ?
La constante de couple (Kt) définit la relation entre le courant moteur et le couple de sortie : T = Kt × I. Les moteurs à Kt plus élevé produisent plus de couple par ampères, améliorant l’efficacité mais généralement au prix d’une vitesse maximale plus basse. La constante de tension (Ke) définit la contre-puissance générée par unité de vitesse : V = Ke × ω. Ces constantes sont reliées par Kt = Ke en unités constantes et représentent des caractéristiques fondamentales de conception moteur qui affectent la performance sur toute la plage de fonctionnement.
Dois-je choisir un encodeur incrémental ou absolu ?
Les encodeurs incrémentaux mesurent le changement de position relative et nécessitent un homing après chaque cycle d’alimentation pour établir une référence de position. Ils coûtent moins cher et sont suffisants pour des applications où le homing est acceptable. Les encodeurs absolus indiquent la position juste après l’allumage sans homing, éliminant ainsi le besoin d’interrupteurs de fin de course et de routines de guidage. Ils coûtent plus cher mais réduisent le temps de démarrage et évitent les plantages. Pour les applications multi-tours, sélectionnez des encodeurs absolus multi-tours qui suivent la position sur plusieurs tours d’arbre.
Comment puis-je dépanner la surchauffe d’un servomoteur ?
Vérifiez d’abord que le couple RMS calculé reste inférieur à la capacité continue du moteur. Vérifiez s’il y a des blocages mécaniques, des frictions excessives ou un désalignement qui oblige le moteur à travailler plus fort que prévu. Vérifiez une ventilation adéquate autour du moteur et assurez-vous que la température ambiante reste conforme aux spécifications. Inspectez les paramètres de réglage de l’entraînement — un gain intégral excessif peut provoquer un flux de courant continu même lorsque le moteur semble immobile. Mesurez le courant réel du moteur pendant le fonctionnement pour vérifier qu’il correspond aux attentes.
8. Conclusion
Choisir un servomoteur n’est pas de la science spatiale — mais il faut adapter le couple, la vitesse, l’inertie et la résolution de retour à ce que fait réellement votre machine. Si vous avez besoin d’une grande vitesse, d’une accélération rapide et d’un positionnement précis sous des charges variables, le servo vaut le coût supplémentaire. Pour des travaux plus simples, lents et à charge constante, un stepper peut faire le travail pour moins cher.
Avant d’acheter, faites les calculs : couple sur tout le cycle, couple à pleine vitesse, rapport d’inertie et résolution de l’encodeur. N’oubliez pas les pièges courants : ignorer la courbe vitesse-couple, oublier l’inertie réfléchie ou sous-estimer les limites de longueur de câble. Pour les projets critiques, faites intervenir dès le début de l’ingénieur des applications du fournisseur automobile. Ils vérifieront vos calculs, suggéreront la bonne taille de frame, et signaleront les pièges d’intégration avant de vous mordre. Prenez des fiches techniques et des notes d’application, et si possible, testez avec un kit d’évaluation avant de vous engager sur le volume.
Prêt à choisir un moteur ? Utilisez les étapes de calcul que nous avons couvertes, comparez quelques marques et demandez à votre fournisseur de revoir votre choix. Cela évite des maux de tête plus tard.