

Guide de sélection des capteurs MEMS : considérations pratiques pour les ingénieurs concepteurs
Lorsque vous êtes plongé dans un nouveau design de produit et que vous devez ajouter des capacités de détection de mouvement, de surveillance environnementale ou de mesure de précision, les capteurs MEMS deviennent souvent la solution de référence. Mais avec des centaines d’appareils MEMS sur le marché — chacun revendiquant des performances supérieures — comment choisir réellement le bon pour votre application ?
Ce guide présente les considérations pratiques qui comptent lors du choix de capteurs MEMS pour des conceptions réelles. Nous couvrirons les paramètres clés qui impactent la performance du système, discuterons des compromis auxquels vous serez confronté lors de la sélection des composants, et mettrons en avant les erreurs courantes d’intégration qui peuvent perturber votre calendrier de conception.
Table des matières
- [Ce que la technologie MEMS apporte à l’électronique moderne] (#1-qu’apporte-la la technologie MEMS à l’électronique moderne)
- [Types clés de capteurs MEMS et principes de fonctionnement] (#2-clé-mems-types-et-principes-de-fonctionnement)
- Paramètres de sélection critiques que vous ne pouvez ignorer
- Critères de sélection spécifiques à l’application
- Considérations sur la disposition et l’intégration du PCB
- [Pièges courants en conception et comment les éviter] (#6-pièges-de-conception-communs-et-comment-les éviter)
- FAQ
- Conclusion
1. Ce que la technologie MEMS apporte à l’électronique moderne
Les MEMS — Micro-Electro-Mechanical Systems — intègrent des éléments mécaniques, capteurs, actionneurs et électroniques sur un seul substrat en silicium. La technologie a beaucoup mûri au cours des deux dernières décennies, et les capteurs MEMS gèrent désormais des tâches qui nécessitaient auparavant des composants discrets volumineux et gourmands en énergie.
L’avantage clé du MEMS est la combinaison d’un format réduit, d’une faible consommation d’énergie et d’une grande scalabilité de la fabrication par lots. Un accéléromètre MEMS dans un boîtier LGA 3x3 mm peut offrir des performances qui auraient nécessité un capteur dix fois plus grand il y a seulement quinze ans. Cette réduction de taille n’est pas seulement importante pour les appareils portables grand public — elle est tout aussi cruciale dans les contrôleurs industriels et les systèmes de sécurité automobile à faible espace.
Cependant, les dispositifs MEMS ne sont pas exempts de compromis. Les structures mécaniques à l’intérieur de ces capteurs sont sensibles aux contraintes environnementales, aux effets thermiques et à la dérive à long terme. Comprendre ces limitations dès le départ vous évitera des refontes coûteuses plus tard.
2. Principaux types de capteurs MEMS et principes de fonctionnement
Différents types de capteurs MEMS utilisent des principes physiques distincts pour mesurer leurs paramètres cibles. Savoir comment fonctionne un capteur vous aide à comprendre ses forces et ses faiblesses.
Les accéléromètres mesurent l’accélération linéaire à l’aide de masses de preuve suspendues par des faisceaux flexibles. Lorsque l’accélération se produit, la masse de preuve se déplace, et les éléments sensoriels capacitifs, piézorésistifs ou piézoélectriques détectent ce mouvement. La détection capacitive domine les accéléromètres MEMS grand public et industriels en raison de sa faible consommation d’énergie et de ses bonnes performances sonores.
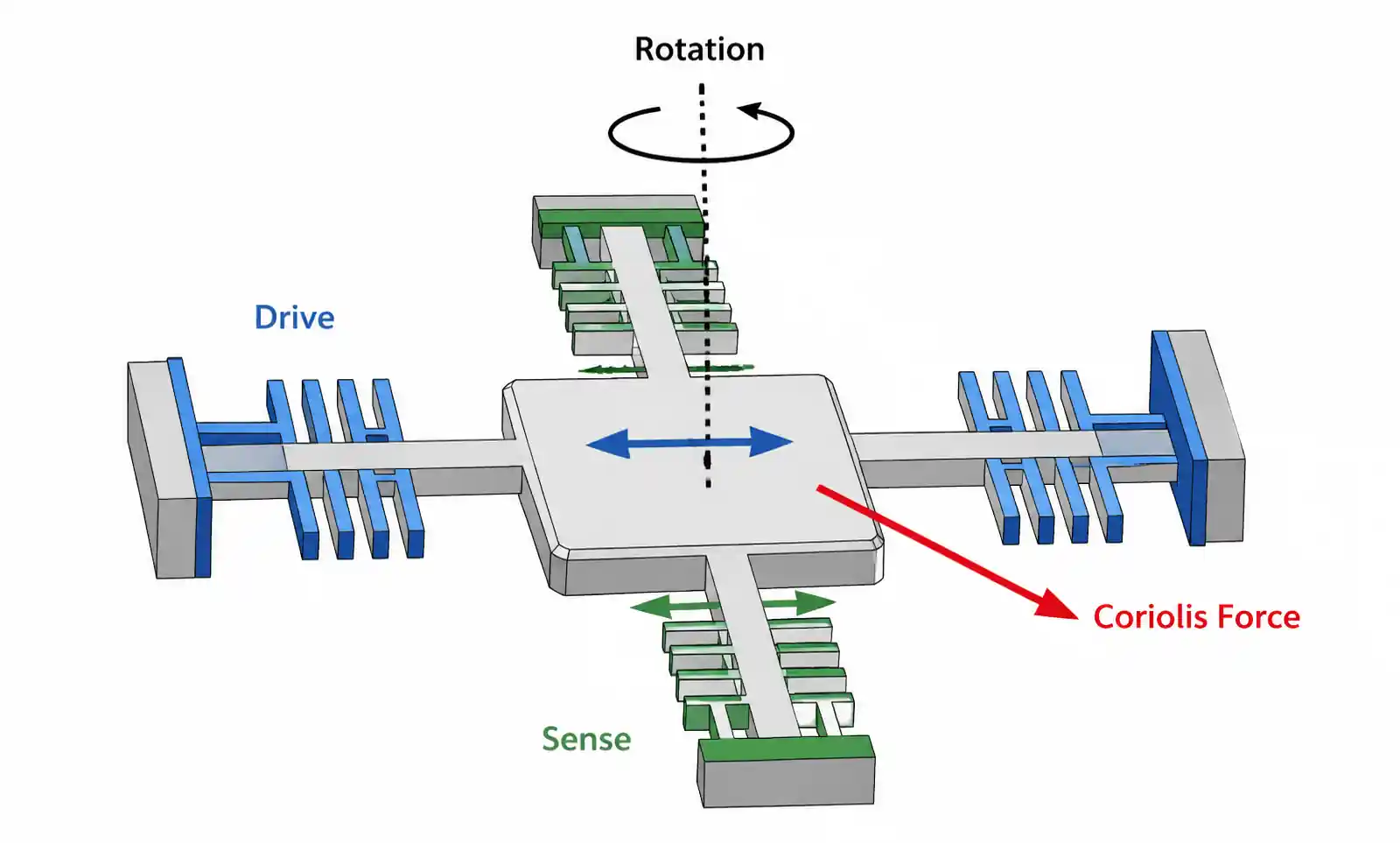
Les gyroscopes mesurent la vitesse angulaire grâce à l’effet Coriolis. Une masse de preuve vibrante subit une force de Coriolis lorsque le capteur tourne, provoquant un déplacement perpendiculaire à la fois à la direction de vibration et à l’axe de rotation. Ce déplacement est mesuré de façon capacitive. Les gyroscopes MEMS sont plus complexes que les accéléromètres et consomment généralement plus d’énergie.
Les capteurs de pression utilisent un diaphragme flexible qui se dévie sous pression appliquée. Les éléments piézorésistifs sur le diaphragme changent la résistance selon la contrainte mécanique, permettant la mesure de la pression. Les capteurs de pression MEMS vont des dispositifs à pression absolue pour la mesure barométrique aux capteurs de pression différentiels pour la surveillance des débits.
Les microphones convertissent la pression sonore en signaux électriques à l’aide d’une membrane flexible et d’une plaque dorsale fixe, formant un condensateur. Les ondes sonores provoquent une déviation de membrane, modifiant la capacité. Les microphones MEMS ont largement remplacé les microphones à condensateur électret dans les smartphones et appareils IoT grâce à leur fiabilité supérieure et leur compatibilité en assemblage automatisé.
Les capteurs environnementaux mesurent la température, l’humidité et la concentration de gaz. Les capteurs de température MEMS utilisent souvent des diodes ou des résistances thermiques. Les capteurs d’humidité reposent sur une détection capacitive ou résistive avec des matériaux diélectriques sensibles à l’humidité. Les capteurs de gaz utilisent des films d’oxyde métallique chauffés dont la résistance change lors de l’exposition au gaz.
3. Paramètres de sélection critiques que vous ne pouvez pas ignorer
Lors de l’évaluation des capteurs MEMS, plusieurs paramètres influencent directement la satisfaction des exigences de performance de votre conception.
Plage et résolution de mesure
La plage de mesure doit couvrir les conditions de fonctionnement de votre application avec une marge. Un accéléromètre pour la détection de collision nécessite une plage de ±50g ou plus, tandis qu’un bracelet d’activité portable fonctionne bien avec ±2g ou ±4g. Les plages plus élevées ont généralement une résolution réduite — on ne peut pas obtenir à la fois la portée maximale et la résolution maximale sur un seul appareil.
La résolution détermine le plus petit changement détectable dans le paramètre mesuré. Pour un suivi précis de l’orientation, il faut un accéléromètre avec une résolution inférieure à la mitrailleuse. Pour une détection de mouvement simple, une résolution de 10 mg suffit. Vérifiez attentivement la spécification de résolution de la fiche technique — certains fournisseurs citent le bruit RMS en μg/√Hz, ce qui nécessite une intégration sur la bande passante du signal pour déterminer la résolution réelle.
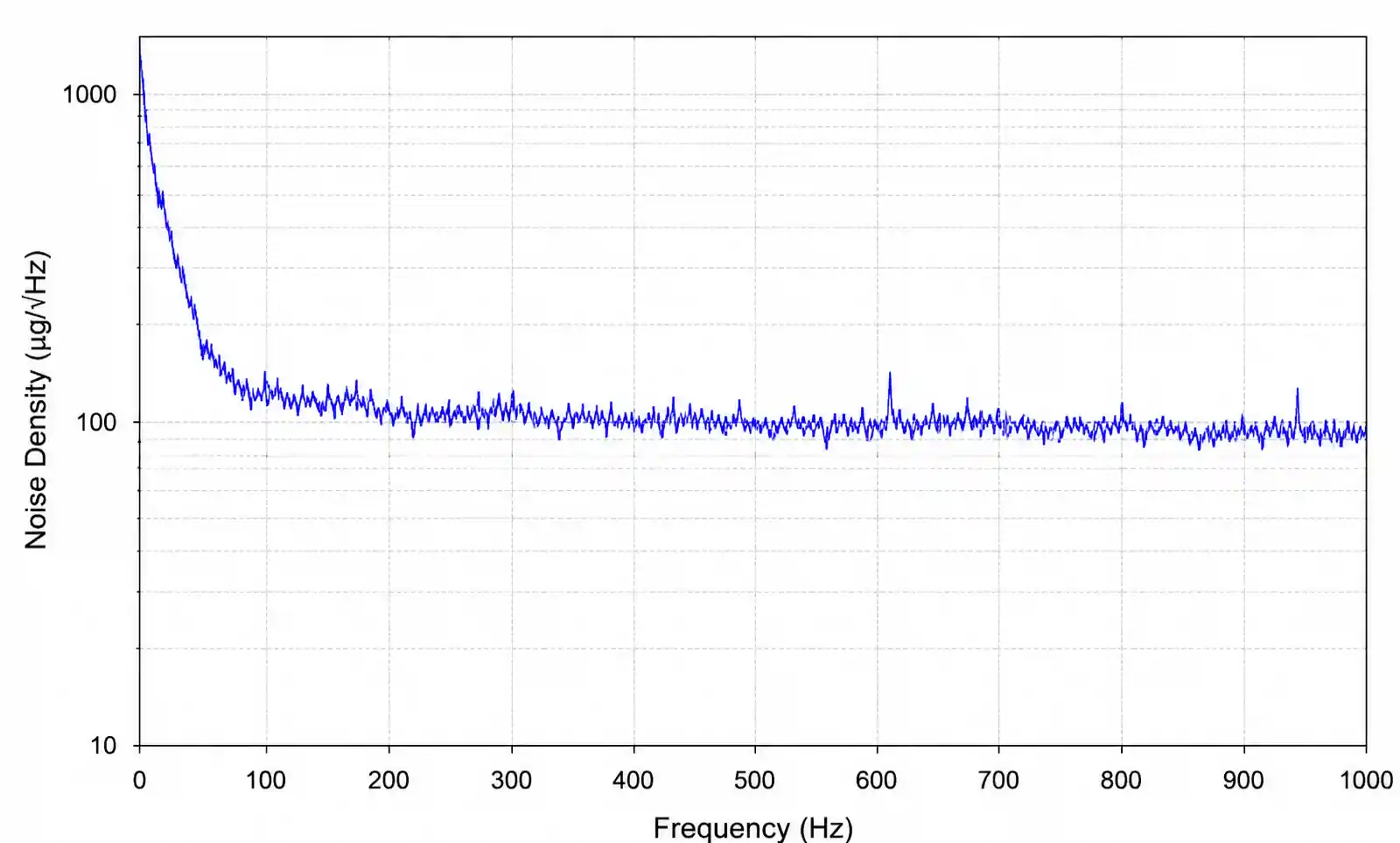
Performance de bruit
Le bruit limite la capacité de votre système à détecter de petits signaux. Les capteurs MEMS présentent plusieurs sources de bruit : bruit mécanique-thermique provenant de la masse de démonstration, bruit électronique provenant des circuits de lecture, et bruit de quantification provenant de l’ADC.
Les accéléromètres et gyroscopes spécifient la densité de bruit en μg/√Hz ou °/s/√Hz. Pour calculer le bruit total dans votre application, multipliez la densité de bruit par la racine carrée de la bande passante de votre signal. Un gyroscope avec une densité de bruit de 0,01°/s/√Hz utilisé avec une bande passante de 100Hz produit environ 0,1°/s de bruit RMS.
Les conceptions à faible bruit nécessitent une attention particulière au filtrage de l’alimentation et à la disposition des circuits imprimés. Nous aborderons les considérations de disposition dans la section 5.
Consommation d’énergie
Les capteurs MEMS sont des dispositifs à faible consommation, mais « faible consommation » signifie différentes choses selon les applications. Un accéléromètre MEMS peut consommer 10μA en mode podomètre toujours activé, ce qui le rend adapté aux appareils portables alimentés par batterie. Le même appareil en mode haute performance pourrait consommer 200μA, ce qui reste acceptable pour les appareils alimentés par USB mais pose problème pour les applications à pilules à monnaie.
De nombreux capteurs MEMS proposent plusieurs modes d’alimentation. Comprendre votre cycle de travail et vos exigences de performance vous aide à choisir un appareil et un mode de fonctionnement qui équilibrent puissance et performance. Ne négligez pas le courant de veille — même quelques microampères de courant de veille comptent dans les conceptions à très faible puissance.
Débit de données de sortie et bande passante
Le débit de données de sortie (ODR) détermine la fréquence à laquelle le capteur fournit des relevés à jour. L’ODR nécessaire dépend de la fréquence du signal que vous devez capturer. Selon le théorème de Nyquist, il faut au moins deux fois la fréquence de signal la plus élevée, mais en pratique, un suréchantillonnage 5 à 10x donne de meilleurs résultats.
Pour la surveillance des vibrations, il se peut que vous ayez besoin d’un ODR de 1 kHz ou plus. Pour la détection d’inclinaison, 10-50Hz suffit. Un ODR plus élevé augmente généralement la consommation d’énergie, donc choisissez le débit minimum qui répond à vos besoins.
La bande passante analogique du capteur est également importante. Certains capteurs filtrent numériquement la sortie, ce qui peut introduire un délai de phase. Vérifiez si le délai de groupe du capteur est acceptable pour votre application, notamment dans les boucles de contrôle ou les mesures temporelles.
Stabilité et calibration de la température
Les capteurs MEMS présentent des variations de décalage et de sensibilité dépendantes de la température. Les accéléromètres peuvent détecter un décalage de 1-2 mg/°C et une dérive de sensibilité de 0,01 à 0,02 %/°C. Pour les applications de précision, il faut un étalonnage d’usine ou intégré au système pour compenser les effets de température.
Vérifiez si le capteur dispose d’un capteur de température intégré pour la compensation de la dérive. Certains dispositifs incluent des coefficients de compensation de température programmés en usine stockés dans une mémoire non volatile. Pour les applications critiques, prévoyez d’implémenter votre propre calibration multipoint de la température lors de la fabrication.
Interface et intégration
Les capteurs MEMS utilisent généralement des interfaces I2C, SPI ou sorties analogiques. L’I2C simplifie les bus multi-appareils mais limite le débit à 400 kHz (mode rapide) ou 1 MHz (mode rapide plus). Le SPI prend en charge des débits de données plus élevés — important pour les applications à forte ODR ou lors de la lecture simultanée de plusieurs capteurs.
La fonctionnalité d’interruption est importante pour les conceptions à contraintes d’énergie. Cherchez des capteurs avec détection de mouvement programmable, franchissement de seuil ou interruptions de filigrane FIFO. Ces fonctionnalités permettent à votre MCU de rester en mode veille jusqu’à ce que le capteur détecte un événement digne d’être traité.
4. Critères de sélection spécifiques à la candidature
Différentes applications priorisent des paramètres différents. Voici comment restreindre votre sélection en fonction de votre marché cible.
Applications automobiles
Les capteurs MEMS automobiles doivent respecter les normes de qualification AEC-Q100 et fonctionner de manière fiable entre -40°C et +125°C (ou +150°C pour les applications sous le capot). Les accéléromètres de détection de collision nécessitent un temps de réponse extrêmement rapide et des taux de survie aux chocs élevés — souvent une tolérance mécanique ± 2000g ou plus.
Le contrôle électronique de stabilité (ESC) et les systèmes de détection de roulement nécessitent des capteurs d’accéléromètre et de gyroscope adaptés avec des tolérances d’étalonnage strictes. De nombreux modèles automobiles utilisent des unités de mesure inertielle (IMU) à 6 axes qui combinent un accéléromètre 3 axes et un gyroscope 3 axes dans un seul boîtier.
Pour les systèmes de surveillance de la pression des pneus (TPMS), il faut des capteurs de pression MEMS capables de gérer l’environnement hostile à l’intérieur d’un pneu : fortes forces centrifuges, grandes variations de température et fiabilité à long terme. Recherchez des appareils ayant un héritage automobile éprouvé et des spécifications environnementales robustes.
| Paramètre | Détection de collision | ESC/Rollover | TPMS |
|---|---|---|---|
| Type de capteur | Accéléromètre | IMU 6 axes | Pression |
| Portée | ±50g à ±400g | ±2g accel, gyroscope ±300°/s | 100-450 kPa absolu |
| Temps de réponse | <0,5 ms | <10 ms | <10 ms |
Les applications automobiles nécessitent une validation et des tests de fiabilité approfondis. Prenez en compte les délais de qualification de 12 à 18 mois lors du choix des composants pour les conceptions automobiles.
Applications industrielles et IoT
Les capteurs industriels nécessitent une stabilité et un fonctionnement à long terme dans des environnements difficiles : vibrations, cycles de température, humidité, et parfois exposition à des produits chimiques. Les systèmes de surveillance de l’état utilisent des accéléromètres MEMS pour détecter l’usure des roulements, le déséquilibre moteur et la dégradation de la santé des machines.
Pour l’analyse des vibrations, il faut des accéléromètres à large bande passante (souvent DC à plusieurs kHz) et à faible bruit. Les accéléromètres MEMS piézoélectriques fonctionnent bien pour la surveillance des vibrations car ils gèrent mieux les hautes fréquences que les dispositifs capacitifs. Cependant, ils ne mesurent pas l’accélération en courant continu, donc ils ne sont pas adaptés à la détection d’inclinaison.

Les nœuds capteurs IoT privilégient une consommation d’énergie ultra-faible et la connectivité sans fil. Un moniteur environnemental alimenté par batterie peut utiliser un capteur de pression MEMS pour le suivi de l’altitude, un capteur combiné température/humidité, et un microphone MEMS pour la détection d’événements acoustiques. Le courant total du système en mode veille peut être de quelques microampères.
Les applications industrielles nécessitent souvent des sorties en boucle de courant de 4 à 20 mA ou des interfaces isolées pour des environnements électriques difficiles. Beaucoup de capteurs MEMS ne fournissent pas de sorties de courant analogique nativement, donc vous aurez besoin de circuits de conditionnement du signal.
Électronique grand public
Les appareils grand public ont conduit à l’expansion massive de la fabrication de MEMS au cours de la dernière décennie. Les smartphones contiennent généralement 6 à 10 capteurs MEMS : accéléromètre, gyroscope, magnétomètre, capteur de pression barométrique, plusieurs microphones, et parfois des capteurs de proximité.
Pour les appareils portables et les trackers d’activité, la taille et la consommation d’énergie sont primordiales. Cherchez des accéléromètres dans des boîtiers sous 2 mm avec un courant de fonctionnement de 10 à 20μA. De nombreux accéléromètres MEMS modernes intègrent des podomètres matériels qui comptent les pas sans intervention du MCU, réduisant drastiquement la puissance du système.
Les vrais écouteurs sans fil ont fait avancer le développement des microphones MEMS. Ces microphones doivent tenir dans des espaces incroyablement restreints tout en maintenant un bon rapport signal/bruit et en supportant des niveaux de pression sonore élevés. Les conceptions à double microphone avec des algorithmes de formation de faisceau offrent une réduction du bruit même dans des environnements bruyants.
| Application | Capteurs clés | Paramètres critiques | Forfait typique | Budget Énergie |
|---|---|---|---|---|
| Smartphone | IMU 6 axes, pression, microphones | Bruit faible, petite taille, robuste | LGA 2,5x3mm | 50-200μA continu |
| Traqueur d’activité physique | Accéléromètre 3 axes | Ultra-faible puissance, podomètre | 2x2mm LGA | Moyenne 10-30μA |
| Écouteurs TWS | Microphone MEMS | SNR >64dB, petite taille | 3,5x2,6mm | N/A (toujours en marche) |
| Montre connectée | IMU 6 axes, pression, microphone | Faible consommation, détection de gestes | LGA 2,5x3mm | Moyenne de 20-100μA |
Les produits de consommation subissent une forte pression sur les coûts. Les conceptions à fort volume bénéficient de stratégies de double approvisionnement, mais sachez que les capteurs de différents fournisseurs ont rarement des caractéristiques de performance identiques. Si vous envisagez de changer de fournisseur, prévoyez le temps de recalibrer et d’ajuster le firmware.
Dispositifs médicaux et de santé
Les applications médicales exigent une fiabilité éprouvée, nécessitant souvent des systèmes de gestion qualité ISO 13485 de la part des fournisseurs. Les dispositifs médicaux portables — glucomètres continus, moniteurs cardiaques, suiveurs respiratoires — utilisent des capteurs MEMS pour la surveillance des patients.
Pour la surveillance respiratoire, les capteurs de pression MEMS mesurent la différence de pression entre les éléments de restriction de flux afin de calculer le volume respiratoire. Ces capteurs nécessitent une excellente linéarité et une répétabilité sur toute la plage de pression concernée (généralement ±2 kPa).
Les mesures de bioimpédance pour l’analyse de la composition corporelle utilisent parfois des accéléromètres MEMS pour détecter la position du corps, ce qui affecte la précision des mesures. Ces accéléromètres ont besoin d’un décalage stable par rapport à la température car même de petites erreurs d’inclinaison se traduisent par des artefacts de mesure.

Les délais liés aux dispositifs médicaux sont longs en raison des exigences réglementaires. Sélectionnez des capteurs MEMS établis ayant une longévité démontrée — vous ne voulez pas que votre capteur choisi devienne obsolète en cours de certification.
5. Disposition des PCB et considérations d’intégration
Même le meilleur capteur MEMS sera moins performant avec une mauvaise disposition du PCB. Voici ce qui compte vraiment selon l’expérience de terrain.
Montage mécanique
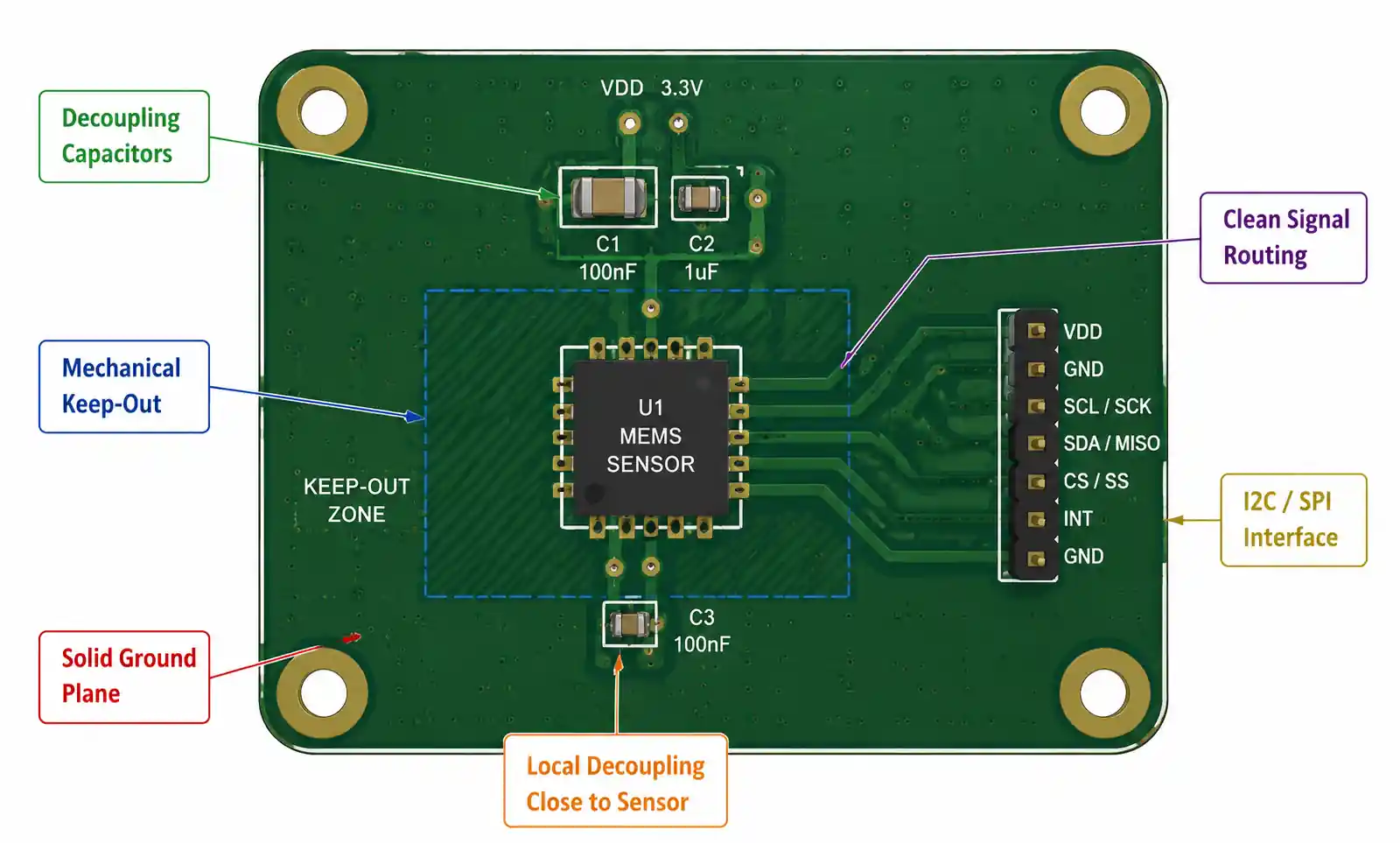
Les capteurs MEMS contiennent des structures mécaniques suspendues qui réagissent aux forces externes. Toute contrainte mécanique transmise via le circuit imprimé affecte les lectures des capteurs. Montez les capteurs MEMS loin des bords de la carte, des trous de montage et des zones à forte contrainte comme les points d’attache des connecteurs.
Utilisez du cuivre massif sous le capteur pour la rigidité mécanique. Évitez de faire passer de grandes pistes ou de couper des plans directement sous l’empreinte du capteur. Si votre PCB subit une flexion importante lors de l’assemblage ou de l’utilisation, envisagez une conception plus petite place-in-carte qui isole le capteur des contraintes mécaniques.
Pour les prototypes soudés à la main, évitez la chaleur excessive et la pression mécanique lors de l’assemblage. Le profil de reflow est important — suivez strictement le profil recommandé par le fabricant du capteur. Une température de pointe excessive ou un temps prolongé au-dessus du liquidus peut endommager les structures internes.
Filtrage de l’alimentation électrique
Les front-ends analogiques des capteurs MEMS sont sensibles au bruit de l’alimentation. Placez toujours un condensateur céramique 100nF aussi près que possible de la broche VDD du capteur — idéalement à 2-3 mm. Utilisez des diélectriques X7R ou X5R, pas des Y5V, pour une capacité stable à travers la température.
Pour les conceptions critiques au bruit, ajoutez un condensateur en vrac de 10μF près du capteur et envisagez un bille de ferrite ou un filtre LC sur la ligne d’alimentation. Vérifiez si la fiche technique de votre capteur spécifie le rapport de rejet de l’alimentation (PSRR) — les appareils avec un PSRR faible sont plus vulnérables au bruit couplé d’alimentation.
Gardez l’alimentation analogique (VDDA) et l’alimentation numérique (VDDIO) séparées si le capteur fournit des alimentations séparées. Cette isolation empêche le bruit de commutation numérique de corrompre les mesures analogiques.
Disposition des interfaces I2C et SPI
Les bus I2C doivent avoir des résistances en série (22-33Ω) proches du dispositif d’entraînement pour réduire la sonnerie du signal et les EMI. Les valeurs des résistances de tirage dépendent de la capacité et de la vitesse du bus — les valeurs typiques varient de 2,2 kΩ à 10 kΩ. Des tractions plus fortes (résistance plus faible) permettent des vitesses plus élevées mais augmentent la consommation d’énergie.
Pour les interfaces SPI, gardez les traces d’horloge et de données courtes et correspondez à leurs longueurs pour minimiser le décalage. Si votre horloge SPI dépasse 10 MHz, utilisez des pistes d’impédance contrôlées et envisagez des résistances de terminaison.
Évitez de router les signaux I2C ou SPI près des alimentations à découpage, des pistes à fort courant ou des structures d’antenne. Ces sources de bruit se connectent à des interfaces numériques sensibles et provoquent des erreurs de communication.
Interruption et routage GPIO
Les interruptions du capteur MEMS produisent la détection de mouvement du signal, le franchissement de seuil ou l’état FIFO. Ces interruptions réveillent souvent votre MCU du sommeil, elles doivent donc être fiables. Acheminez les signaux d’interruption sur les couches internes ou protégez-les avec des pistes de masse pour éviter les fausses alertes d’EMI.
N’utilisez pas les signaux d’interruption pour autre chose que l’entrée MCU — évitez de partager ces réseaux avec d’autres fonctions ou appareils. Vérifiez les caractéristiques électriques des broches d’interruption : certains capteurs utilisent des sorties à drain ouvert nécessitant des pull-ups externes, tandis que d’autres fournissent des sorties push-pull.
Considérations thermiques
Les capteurs MEMS présentent des dérives décalées dépendantes de la température. Évitez de placer les composants générateurs de chaleur (régulateurs de puissance, processeurs à haute vitesse, amplificateurs RF) près de vos capteurs MEMS. Même quelques degrés d’auto-chauffage provenant de composants proches peuvent entraîner une erreur de mesure.
Si l’isolation thermique n’est pas possible, implémentez la compensation de température dans le firmware en utilisant la sortie intégrée de température du capteur. L’étalonnage multipoint sur toute la plage de température de fonctionnement aide, mais ajoute de la complexité et du coût de fabrication.
6. Pièges courants en conception et comment les éviter
Après avoir examiné des centaines de conceptions de capteurs MEMS, certaines erreurs apparaissent à répétition. Voici ceux qui causent le plus de douleur.
Ignorer les effets des contraintes mécaniques
La flexion du circuit imprimé lors de la fabrication, de l’assemblage ou de l’exploitation transfère la contrainte dans les capteurs MEMS. Cette contrainte se manifeste par des décalages ou des variations de sensibilité. J’ai vu des modèles où les relevés de l’accéléromètre changeaient de 50 mg rien qu’en serrant les vis de l’enceinte.
La solution : isoler mécaniquement les capteurs MEMS des points de concentration de contrainte. Utilisez des entretoiles ou joints en caoutchouc entre le PCB et le boîtier. Si votre produit subit de fortes vibrations ou chocs, envisagez de rempoter la zone du capteur avec un matériau souple.
Filtrage insuffisant de l’alimentation
Les régulateurs à commutation et les convertisseurs DC-DC produisent un bruit à haute fréquence qui se couple dans les alimentations des capteurs MEMS. Ce bruit augmente l’incertitude de mesure et réduit la résolution effective. Un projet peut montrer d’excellentes performances en laboratoire avec une alimentation de laboratoire propre, puis échouer en production parce que l’alimentation du système est bruyante.
La solution : Testez toujours avec votre alimentation finale de production, pas avec des fournitures de laboratoire de laboratoire. Ajoutez un filtrage LC ou RC sur les alimentations capteurs si vous constatez une dégradation des performances liée au bruit. Mesurez le bruit d’alimentation au niveau de la broche du capteur avec un oscilloscope — ne supposez pas que votre alimentation est propre.
Sous-estimation des exigences d’étalonnage
L’étalonnage d’usine couvre le décalage et la sensibilité à température ambiante, mais les capteurs MEMS dérivent selon la température, l’âge et les contraintes mécaniques. Les applications nécessitant une précision supérieure à 1 % nécessitent généralement une étalonnage intégré au système.
La solution : concevez la calibration dans votre processus de fabrication dès le départ. Pour les accéléromètres, cela signifie mesurer la sortie en plusieurs orientations (généralement six positions) et calculer les erreurs de décalage et de sensibilité. Pour les gyroscopes, mesurez le décalage à taux zéro à plusieurs températures. Prévoyez 30 à 60 secondes par unité pour l’étalonnage — ce temps s’additionne pour une production à grande volée.
Sens et exigences d’application incompatibles
Choisir un capteur haute performance alors qu’un appareil basique suffit est un gaspillage d’argent et d’énergie. Inversement, choisir un capteur sous-spécifié pour atteindre les objectifs de coût crée des problèmes de performance qui ne surviennent peut-être qu’après le début de la production.
La solution : notez vos besoins réels en termes de portée, résolution, bruit, bande passante et puissance avant d’acheter des capteurs. Laisse une marge pour la variation de fabrication et les extrêmes environnementaux, mais ne te surspécifie pas de 10 fois par précaution. Prototypez avec votre capteur cible, pas une carte de développement, pour valider les performances réelles.
Hypothèses d’intégration du firmware
Les fiches techniques des capteurs MEMS fournissent des cartes de registres et des protocoles de communication, mais elles expliquent rarement les subtilités de l’initialisation correcte de l’appareil, de la gestion des conditions d’erreur ou de l’optimisation de la consommation d’énergie. Les utilisateurs débutants ont souvent du mal à trouver une bonne configuration.
La solution : utiliser le code pilote fourni par le fournisseur comme point de départ, même si vous prévoyez d’écrire un firmware personnalisé. Le code du fournisseur gère généralement les séquences d’initialisation, les exigences de timing et les particularités de configuration qui ne sont pas évidentes dans la fiche technique. Rejoignez les forums développeurs des fournisseurs ou contactez le support FAE si vous rencontrez des problèmes d’intégration.
Ignorer la stabilité à long terme
Les capteurs MEMS dérivent au fil du temps en raison de la relaxation des matériaux, de l’évolution des contraintes d’emballage et de l’exposition environnementale. Un capteur qui fonctionne parfaitement à la production initiale peut montrer un décalage significatif après six mois sur le terrain.
La solution : demandez des données de stabilité à long terme auprès de votre fournisseur de capteurs. Pour les applications critiques, mettez en place une auto-étalonnage périodique ou exigez que les utilisateurs effectuent des procédures d’étalonnage. Certains capteurs MEMS avancés intègrent des fonctions d’auto-test et d’étalonnage qui permettent de maintenir la précision tout au long de la durée de vie du produit.
7. FAQ
Quelle est la différence entre les capteurs MEMS analogiques et numériques ?
Les capteurs de sortie analogique fournissent une tension proportionnelle au paramètre mesuré, nécessitant un ADC externe pour le traitement numérique. Les capteurs de sortie numériques intègrent un ADC et communiquent via I2C ou SPI. Les capteurs numériques simplifient la conception et réduisent le nombre de composants, mais les capteurs analogiques offrent une latence plus faible et sont plus faciles à interfacer avec les chaînes de signaux analogiques. Pour les conceptions modernes avec intégration MCU, les capteurs numériques sont généralement le meilleur choix, sauf si vous avez des exigences spécifiques en traitement analogique.
Comment calculer la plage requise de l’accéléromètre MEMS pour mon application ?
Additionnez toutes les sources d’accélération que votre appareil subit : gravité (1g), mouvement prévu (par exemple, 3g pour la détection de gestes) et événements de choc/impact (pouvant être de 10 à 100g selon le produit). Ajoutez une marge de 20 à 30 % pour les conditions inattendues. Par exemple, un bracelet d’activité peut ressentir 1g de gravité + 2g de mouvement du bras + 10g de choc de chute, ce qui suggère un capteur de ±16g avec marge. N’oubliez pas que les applications d’inclinomètre doivent résoudre les composantes gravitationnelles, donc une plage plus élevée réduit la résolution d’inclinaison.
Puis-je utiliser le même capteur MEMS sur plusieurs variantes de produits avec des exigences différentes ?
Parfois, mais fais attention. De nombreux capteurs MEMS offrent des plages programmables, des réglages de filtre et des modes d’alimentation qui permettent à un seul appareil de répondre à plusieurs cas d’usage. Cependant, une performance optimale nécessite généralement des capteurs conçus spécifiquement. Un accéléromètre à faible bruit et faible puissance pour le comptage des pas ne gère pas bien la détection de collision à haute gravité. Évaluez si un seul capteur répond réellement à toutes les exigences ou si vous compromettez les performances pour réduire la complexité des lettres de nom.
Qu’est-ce qui cause la dérive du décalage à taux zéro du gyroscope MEMS ?
Le décalage à taux zéro (la lecture de sortie lorsque le capteur ne tourne pas) dérive à cause des variations de température, des contraintes mécaniques et de la marche aléatoire inhérente. La température est le principal contributeur — le décalage gyroscope varie généralement de 0,01 à 0,1°/s par degré Celsius. Cette dérive s’accumule dans les applications de calcul par terre, provoquant des divergences dans les estimations de position au fil du temps. Les meilleurs gyroscopes ont des coefficients de température plus faibles et une compensation intégrée de température, mais aucun gyroscope MEMS n’est sans dérive. Le fonctionnement à long terme nécessite un re-réglage périodique à l’aide de références externes (GPS, magnétomètre ou détection stationnaire).
Dois-je implémenter mon propre algorithme de fusion de capteurs ou utiliser des bibliothèques de fournisseurs ?
Les algorithmes de fusion de capteurs fournis par les fournisseurs (comme le BSX de Bosch, le MotionFX de ST ou le Digital Motion Processor d’InvenSense) permettent d’économiser un temps de développement important et sont bien testés sur des millions d’unités. Utilisez-les à moins d’avoir des exigences spécifiques qu’elles ne remplissent pas ou de construire un avantage concurrentiel grâce à des algorithmes personnalisés. Mettre en œuvre une fusion robuste des capteurs à partir de zéro nécessite une compréhension approfondie du filtrage de Kalman, des mathématiques des quaternions et des tests approfondis en conditions réelles. Prévoyez 3 à 6 mois d’ingénierie si vous optez pour une spécialisation personnalisée.
Comment puis-je choisir entre accéléromètres MEMS capacitifs et piézoélectriques ?
Les accéléromètres MEMS capacitifs mesurent le courant continu à plusieurs kHz, consomment peu d’énergie et dominent les applications grand public et industrielles. Les accéléromètres piézoélectriques ont des sorties couplées en courant alternatif (ne mesurant pas l’inclinaison statique), une bande passante plus élevée (du courant continu à 10 kHz+) et de meilleures performances en surveillance des vibrations. Choisissez capacitif pour la détection d’inclinaison, le suivi d’orientation ou la pédométrie. Choisissez la méthode piézoélectrique pour l’analyse des vibrations, la détection d’impact ou la surveillance structurelle haute fréquence.
Quels tests dois-je effectuer pour valider l’intégration des capteurs MEMS ?
Au minimum : vérifier la communication (lire WHO_AM_I registre ou équivalent), vérifier la sortie aux orientations connues (accéléromètre), vérifier la compensation de température sur toute votre plage de fonctionnement, tester la fonctionnalité d’interruption, mesurer la consommation d’énergie dans tous les modes de fonctionnement, et effectuer des tests ESD sur les broches du capteur. Pour la production, mettez en place des tests automatisés d’étalonnage et fonctionnels. Prévoyez un budget pour des tests environnementaux (cycles de température, exposition à l’humidité, choc mécanique) si votre application a des exigences de fiabilité au-delà de l’usage habituel des consommateurs.
Comment les perturbations de la chaîne d’approvisionnement affectent-elles la disponibilité des capteurs MEMS ?
Les capteurs MEMS nécessitent des processus de fabrication spécialisés, et la plupart des fournisseurs exploitent leurs propres usines (STMicroelectronics, Bosch Sensortec) ou utilisent des fonderies MEMS dédiées (Silex, Teledyne DALSA). Cette intégration verticale offre une bonne stabilité de la chaîne d’approvisionnement par rapport aux entreprises purement sans usine, mais les délais peuvent tout de même s’étendre à 20 à 30 semaines lors des périodes de forte demande. Établir des relations avec les distributeurs autorisés, s’engager sur des prévisions de volume et maintenir 3 à 6 mois de stock tampon pour les conceptions de production. Envisagez le double approvisionnement pour les produits à grand volume, mais validez soigneusement les performances — les capteurs MEMS de différents fournisseurs fonctionnent rarement de manière identique, même avec des spécifications similaires.
8. Conclusion
Choisir le bon capteur MEMS nécessite d’équilibrer les performances techniques, la consommation d’énergie, le coût et les considérations liées à la chaîne d’approvisionnement. Commencez par définir clairement vos besoins d’application : plage de mesure, résolution, bande passante, plage de température et budget énergétique. Utilisez ces exigences pour réduire le champ à une poignée de candidats, puis faites un prototype avec vos premiers choix pour valider la performance réelle.
Ne sous-estimez pas les défis d’intégration : la disposition des circuits imprimés, l’isolation mécanique des contraintes et l’intégration du firmware influencent tous la performance de votre capteur MEMS dans votre produit final. Prévoyez du temps pour le développement de l’étalonnage et les tests de validation, surtout si votre application nécessite une précision supérieure à 5 %.
Pour les applications sur les marchés automobile, médical ou industriel, engagez les fournisseurs de capteurs dès le début de votre cycle de conception. Le support FAE peut vous aider à naviguer dans les exigences de qualification, à comprendre les caractéristiques de stabilité à long terme et à optimiser votre conception pour la fabricabilité.
Si vous finalisez la sélection des composants pour un projet à venir, téléchargez des fiches techniques détaillées pour vos capteurs présélectionnés et consultez les notes de candidature spécifiques à votre marché cible. La plupart des fournisseurs MEMS proposent des conceptions de référence et des cartes d’évaluation qui permettent de prototyper rapidement. Pour des questions complexes d’intégration ou des exigences personnalisées, contactez le support technique : les fournisseurs souhaitent que votre conception réussisse et répondent généralement aux demandes d’ingénierie authentiques.