

Guide de sélection du capteur de gyroscope : comment choisir le bon gyroscope MEMS pour votre application
Choisir le bon capteur gyroscope nécessite de comprendre les compromis entre la plage de mesure, la sensibilité, la performance sonore et la consommation d’énergie. Ce guide vous guide à travers les paramètres techniques clés, les critères de sélection spécifiques à chaque application et les considérations de conception qui impactent directement la performance des systèmes dans les applications de détection de mouvement.
Table des matières
- [Introduction : Ce que ce guide couvre](#1-introduction-qu’est-ce que ce guide couvre)
- Paramètres techniques clés expliqués
- Comment choisir le bon capteur de gyroscope
- Comparaison des performances par application
- [Considérations de conception et pièges courants] (#5-considérations-et-pièges-courants)
- [Considérations sur la chaîne d’approvisionnement et l’approvisionnement] (#6-Considérations de la chaîne d’approvisionnement et des approvisionnements)
- FAQ
- Conclusion
1. Introduction : Ce que ce guide couvre
Les capteurs gyroscopiques mesurent la vitesse angulaire et sont des composants essentiels dans les systèmes modernes de suivi de mouvement. De la rotation de l’écran des smartphones au contrôle de stabilité automobile et à la stabilisation de vol des drones, les gyroscopes MEMS sont devenus la solution standard en raison de leur taille compacte, de leur faible consommation d’énergie et de leur rapport qualité-prix par rapport aux gyroscopes mécaniques traditionnels.
Ce guide est écrit pour les ingénieurs concepteurs, les équipes R&D et les responsables achats qui doivent sélectionner des capteurs gyroscopiques pour des applications spécifiques. Plutôt que de fournir un aperçu général de la technologie gyroscopique, nous nous concentrons sur la méthodologie de sélection, les compromis des paramètres et les considérations pratiques de conception basées sur des exigences d’ingénierie réelles.
Que vous conceviez une IMU pour la robotique industrielle, que vous ajoutiez la détection de mouvement à un appareil portable ou que vous implémentiez la stabilisation dans un cardan de caméra, comprendre comment les spécifications du gyroscope se traduisent en performance système est crucial. Nous couvrons les paramètres les plus importants pour votre application, les erreurs de sélection courantes, ainsi que la manière de valider votre choix grâce à des tests appropriés et une vérification de conception.
2. Paramètres techniques clés expliqués
Comprendre les spécifications du gyroscope nécessite d’aller au-delà des valeurs de la fiche technique pour comprendre comment chaque paramètre affecte les performances de votre système. Voici les paramètres critiques qui guident les décisions de sélection.
Plage de mesure et plage à l’échelle réelle
La plage de mesure, généralement spécifiée en degrés par seconde (°/s ou dps), définit la vitesse angulaire maximale que le capteur peut mesurer. Les portées courantes incluent ±250, ±500, ±1000 et ±2000 DPS. L’essentiel est d’adapter la plage aux vitesses de rotation attendues de votre application. Une application de rotation d’écran d’un smartphone dépasse rarement 500 dps, tandis qu’un drone effectuant des manœuvres agressives peut nécessiter 2000 dps ou plus.
Choisir une plage trop large pour votre application réduit la résolution effective. Puisque la profondeur de bits de l’ADC reste constante, la répartir sur une plage plus large signifie que chaque LSB représente un incrément de vitesse angulaire plus élevé. Pour les applications de précision, utilisez la plage la plus étroite qui correspond à votre taux angulaire maximal attendu ainsi qu’une marge raisonnable.
Sensibilité et résolution
La sensibilité s’exprime en LSB/dps (bits les moins significatifs par degré par seconde) ou en mV/dps pour les sorties analogiques. Une sensibilité plus élevée offre une meilleure résolution pour détecter de petits mouvements angulaires. Cependant, la sensibilité seule ne détermine pas la précision du système — il faut aussi prendre en compte la densité du bruit et la stabilité des polarisations.
La résolution dépend à la fois de la profondeur de bits de l’ADC et de la plage de mesure sélectionnée. Un gyroscope 16 bits avec une plage de ±250 dps offre environ 0,0076 dps par LSB, tandis que le même capteur configuré pour ±2000 dps ne fournit que 0,061 dps par LSB. Cette différence de résolution de huit fois peut être cruciale pour les applications nécessitant un suivi précis de la position angulaire par intégration.
Densité de bruit et déviation d’Allan
La densité de bruit, mesurée en °/s/√Hz ou mdps/√Hz, caractérise le plancher de bruit du capteur sur tout le spectre de fréquences. Une densité de bruit plus faible permet de détecter des vitesses angulaires plus faibles et améliore la précision angulaire lors de l’intégration de la sortie gyroscope au fil du temps. Pour les applications de haute précision comme les équipements de topographie ou les systèmes de pointage d’antenne, une densité de bruit inférieure à 0,01 °/s/√Hz est généralement requise.
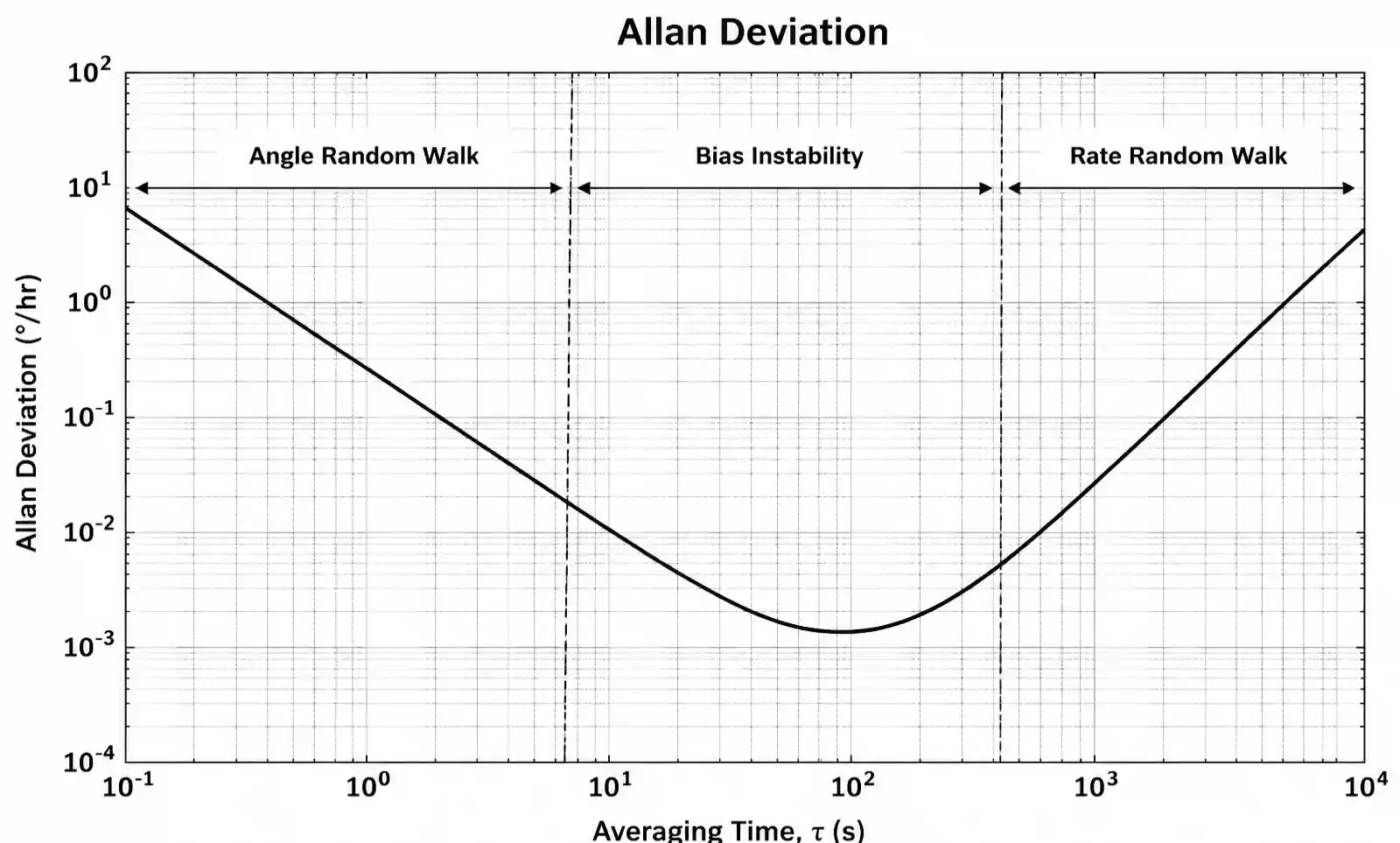
Les diagrammes de déviation d’Allan offrent une vue d’ensemble complète des caractéristiques du bruit du gyroscope sur différents temps d’intégration. Le graphique révèle la marche aléatoire par angle (bruit à court terme), l’instabilité des biais (bruit de scintillement à des échelles de temps moyennes) et la marche aléatoire à taux (dérive à long terme). Comprendre ces caractéristiques est essentiel pour des applications impliquant le dead reckoning ou l’estimation d’attitude à long terme.
Sortie à taux zéro et stabilité de polarisation
La sortie à taux zéro (ZRO), également appelée décalage ou polarisation, est la sortie du capteur lorsqu’aucune rotation n’est présente. Le décalage initial à l’allumage peut être calibré, mais l’instabilité de polarisation — combien le décalage dérive dans le temps et la température — affecte directement la précision du système. L’instabilité de polarisation est généralement spécifiée en °/h (degrés par heure) et représente le taux de dérive minimal possible après étalonnage.
Pour les applications de navigation, la stabilité de polarisation est souvent le facteur limitant de la précision de la position. Un gyroscope avec une instabilité de polarisation de 10 °/h accumulera environ 240 degrés d’erreur sur 24 heures s’il n’est pas corrigé. Les gyroscopes MEMS grand public présentent généralement une instabilité de polarisation de 5 à 50 °/h, tandis que les dispositifs tactiques atteignent 0,1 à 10 °/h, et les capteurs de navigation descendent en dessous de 0,01 °/h.
Bande passante et débit de données de sortie
La bande passante définit la plage de fréquences des entrées à taux angulaire que le capteur peut mesurer avec précision. Pour la plupart des applications de détection de mouvement, une bande passante de 50 à 100 Hz suffit pour capturer le mouvement humain ou des mouvements robotiques lents. Les applications à haute vitesse comme l’analyse des vibrations ou la détection d’impact nécessitent une bande passante plus large, souvent à 200 Hz ou plus.
Le débit de données de sortie (ODR) doit être au moins deux fois supérieur à la bande passante du signal selon le critère de Nyquist, mais les systèmes pratiques utilisent généralement un suréchantillonnage de 4 à 10 fois pour un filtrage numérique efficace et une réduction du bruit. Les ODR courants vont de 100 Hz pour les applications à faible consommation à 8 kHz pour les systèmes haute performance. Notez qu’un ODR plus élevé augmente la consommation d’énergie et les besoins en traitement des données.
3. Comment choisir le bon capteur gyroscope
Le choix d’un gyroscope nécessite de correspondre les exigences d’application aux spécifications des capteurs via un processus d’évaluation systématique. Voici une méthodologie pratique basée sur une expérience de conception dans plusieurs domaines.
Étape 1 : Définir les exigences de candidature
Commencez par quantifier les exigences de votre système en termes d’ingénierie. Quelle est la vitesse angulaire maximale à mesurer ? Quelle précision de position angulaire doit-on maintenir, et sur quelle période ? Quelles conditions environnementales (plage de température, choc, vibration) le capteur doit-il supporter ? Quel budget énergétique est disponible ?
Par exemple, une application smartphone peut nécessiter : une plage de ±500 dps, une précision de 1° pour la rotation de l’écran, un fonctionnement de -20°C à 60°C, moins de 1 mA de consommation moyenne de courant. Un capteur d’articulation robotique industriel peut nécessiter : une plage de ±250 dps, une précision de position de 0,1° sur fonctionnement continu, de -40°C à 85°C, une tolérance aux chocs de 10 000 g, et une détection redondante des pannes.
Étape 2 : Sélectionnez la plage de mesure
Choisissez la plage de mesure la plus étroite qui correspond à votre taux angulaire maximal attendu, avec une marge de sécurité de 20 à 30 %. Si votre application implique une rotation maximale de 300 dps, choisissez un capteur de ±500 dps plutôt que ±2000 dps. Cela préserve la résolution et le rapport signal/bruit.
Pour les applications avec des vitesses angulaires très variables, considérons les capteurs à plages programmables. De nombreux gyroscopes MEMS modernes permettent une sélection de plage configurable par logiciel, ce qui vous permet d’optimiser la résolution dynamiquement en fonction des conditions de fonctionnement.
Étape 3 : Évaluer la performance du bruit
Calculez le budget d’erreur angulaire à partir de l’intégration du bruit. Si votre application intègre la sortie gyroscope pour estimer l’angle, la densité du bruit et la stabilité des polarisations deviennent critiques. Utilisez la spécification de déviation d’Allan pour estimer la dérive sur votre temps d’exploitation requis.
Une approximation rapide : la marche aléatoire d’angle (en °/√h) multipliée par la racine carrée du temps de mesure (en heures) donne la dérive d’angle attendue par rapport au bruit. Pour un fonctionnement de 10 minutes avec une marche aléatoire à angle de 0,1 °/√h, attendez-vous à environ 0,04° de dérive de cette seule source de bruit.
Étape 4 : Évaluer la stabilité de la température
La sensibilité à la température influence à la fois le décalage et le facteur d’échelle. Examinez les spécifications des coefficients de température : polarisation vs. température (°/s/°C) et variation de sensibilité au fil de la température (ppm/°C ou %/°C). Pour les applications extérieures ou les systèmes à auto-chauffage important, la compensation de température devient essentielle.
Certains gyroscopes intègrent des capteurs de température internes et fournissent des coefficients de compensation calibrés en usine dans les registres des dispositifs. Mettre en place cette compensation dans votre firmware peut réduire les erreurs induites par la température de 5 à 10 fois par rapport à un fonctionnement non compensé.
4. Comparaison des performances par application
Différentes applications privilégient différentes caractéristiques du gyroscope. Cette comparaison vous aide à identifier les spécifications les plus importantes pour votre cas d’usage.
| Application | Plage de mesure | Métrique clé de performance | Stabilité typique des biais | Budget Énergie | Exemples de parties |
|---|---|---|---|---|---|
| Smartphone / Tablette | ±500 à ±2000 DPS | Consommation d’énergie | 5-20 °/h | <1 mA | BMI270, ICM-42605 |
| Drone / UAV | ±2000 à ±4000 DPS | Taux de mise à jour, tolérance aux chocs | 10-30 °/h | 2-5 mA | MPU-6500, BMI088 |
| Robot industriel | ±250 à ±1000 DPS | Polarisation, stabilité, linéarité | 2-10 °/h | Pas critique | ADXRS645, L3GD20H |
| Automobile (ADAS/ESC) | ±300 à ±500 DPS | Stabilité de la température, AEC-Q100 | 1-5 °/h | <3 mA | BMI260, LSM6DSO32 |
| Stabilisation de la caméra | ±125 à ±500 DPS | Densité de bruit, bande passante | 5-15 °/h | <2 mA | LSM6DS3TR-C, BMG250 |
| Fitness portable | ±500 à ±1000 DPS | Ultra-faible puissance | 10-30 °/h | <0,5 mA | BMA456, KX126-1063 |
Ce tableau met en lumière les compromis des paramètres selon les applications. Le mouvement à grande vitesse (drones) exige une large plage de mesures et des taux de mise à jour rapides, mais peut tolérer un bruit et une consommation d’énergie plus élevés. Les applications de précision (robotique, topografia) nécessitent une excellente stabilité de la polarisation et un faible bruit, mais fonctionnent à des taux angulaires modérés. Les appareils à batterie (wearables) privilégient la consommation d’énergie plutôt que la précision absolue.
Lorsque vous évaluez les gyroscopes pour votre application, identifiez d’abord vos exigences non négociables. Si vous devez remplir la qualification AEC-Q100 pour une utilisation automobile, cela réduit immédiatement vos options. Si vous disposez d’un budget d’alimentation de 200 μA pour la détection de mouvement en permanence, cette contrainte pilote la sélection des capteurs plus que n’importe quel paramètre de performance.
| Priorité de sélection | Applications principales | Considération secondaire |
|---|---|---|
| Densité de bruit < 0,01 °/s/√Hz | Navigation, topographie, robotique de précision | Stabilité de polarisation, performance en température |
| Stabilité de polarisation < 5 °/h | Estimation morte, suivi d’attitude à longue durée | Densité sonore, tolérance aux chocs |
| Puissance < 500 μA | Appareils portables, capteurs IoT, appareils alimentés par batterie | Plage de mesure, flexibilité du débit de données |
| Température de fonctionnement de -40 à 125°C | Automobile, industriel, équipements de plein air | Caractéristiques de compensation de température |
5. Considérations de conception et pièges courants
Une bonne intégration du gyroscope nécessite une attention particulière à la disposition des circuits imprimés, à la conception de l’alimentation, aux procédures d’étalonnage et au montage mécanique. Ces détails d’implémentation déterminent souvent si vous atteignez des performances de fiche technique dans votre système.
Disposition du PCB et montage mécanique
Montez le gyroscope aussi près que possible du centre de rotation du système. Le montage décalé introduit des composants d’accélération translationnelle qui s’accouplent dans les lectures du gyroscope, notamment lors du mouvement linéaire et rotationnel combiné. Pour un gyroscope monté à 5 cm du centre de rotation, une accélération linéaire de 1g produit une erreur apparente de vitesse angulaire d’environ 2 rad/s (115 dps) — significative pour de nombreuses applications.
Un montage mécanique sécurisé est essentiel. Toute flexibilité ou jeu dans le support permet au capteur de ressentir des vibrations locales différentes de la cible de mesure prévue. Utilisez un montage à quatre points pour les boîtiers plus volumineux et assurez-vous que le PCB lui-même est rigidement supporté. Pour les environnements à forte vibration, pensez aux supports d’isolation des vibrations, mais en gardant en compte que cela peut introduire un décalage de phase dans la réponse dynamique.
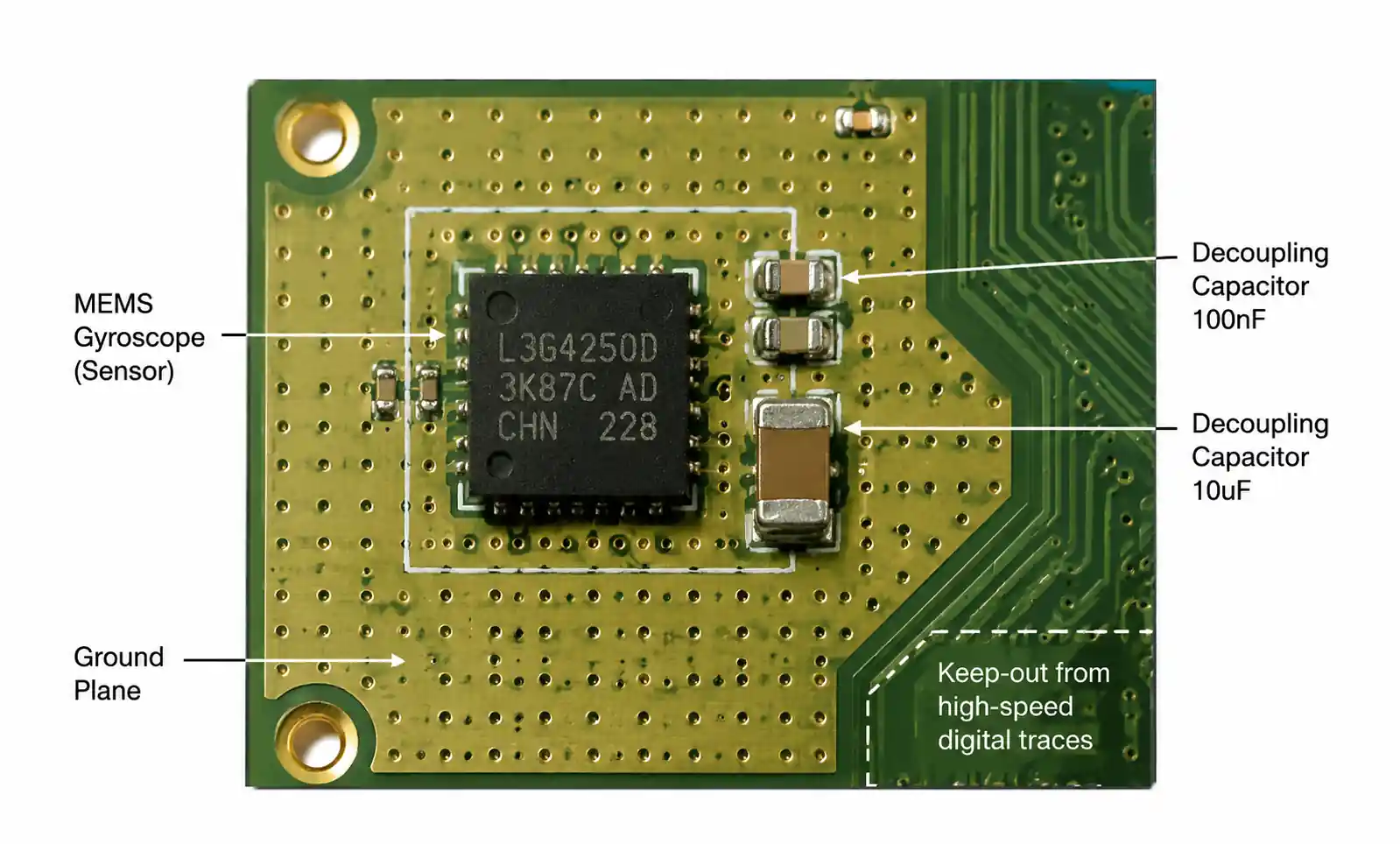
Faites attention au routage du circuit imprimé près du gyroscope. Gardez les signaux numériques à haute vitesse et les alimentations à commutation éloignés du capteur pour minimiser les interférences électromagnétiques. Utilisez un plan de masse solide sous le gyroscope et placez les condensateurs de découplage aussi près que possible des broches d’alimentation. Les recommandations typiques incluent un condensateur céramique de 100 nF à moins de 2-3 mm de la broche VDD, ainsi qu’un condensateur en vrac de 10 μF à proximité.
Besoins en alimentation électrique
Les gyroscopes MEMS sont sensibles au bruit de l’alimentation, qui se couple directement aux circuits de détection analogiques. Maintenir la fluctuation de l’alimentation électrique inférieure à 50 mV de pointe à crête, de préférence en dessous de 10 mV pour les applications de haute précision. Utilisez un régulateur LDO à faible bruit dédié au gyroscope plutôt que de partager une sortie de régulateur à commutation avec des circuits numériques.
La séquence d’allumage compte pour certains appareils. Consultez la fiche technique pour connaître les exigences concernant le débit de tension, le temps de réglage avant la première communication ou les procédures d’initialisation. De nombreux gyroscopes nécessitent 10 à 100 ms après l’allumage avant que des données valides ne soient disponibles, car les circuits internes se stabilisent et les routines d’auto-test se terminent.
Calibration et compensation
L’étalonnage d’usine offre une précision de base, mais l’étalonnage spécifique à l’application améliore significativement les performances. Au minimum, mettez en place une routine d’étalonnage à taux zéro qui mesure le décalage lorsque le système est stationnaire et soustrait cette valeur des lectures ultérieures. Pour de meilleurs résultats, effectuez cette calibration une fois que l’appareil a atteint l’équilibre thermique.
La compensation de température réduit la dérive dans toute la plage de température de fonctionnement. L’approche la plus simple capture des valeurs de décalage à plusieurs points de température pendant la production et stocke une table de recherche de compensation ou des coefficients polynomiaux dans une mémoire non volatile. Des méthodes plus sophistiquées compensent également les variations de facteur d’échelle et de désalignement des axes avec la température.
La sensibilité transversale — la réponse du capteur aux vitesses angulaires autour des axes non primaires — varie généralement de 1 % à 5 % dans les gyroscopes MEMS. Pour les applications nécessitant un couplage serré entre les axes ou une mesure précise de la vitesse angulaire 3D, caractérisez et compensez les effets d’axe transversal via une transformation matricielle de rotation.
Erreurs de conception courantes à éviter
Une erreur fréquente est de sous-estimer l’impact des vibrations sur les relevés du gyroscope. Des vibrations à haute fréquence peuvent s’infiltrer dans la bande passante de mesure, créant des vitesses angulaires apparentes qui ne correspondent pas à la rotation réelle. Implémentez des filtres anti-aliasing avant l’ADC (pour les gyroscopes de sortie analogique) ou utilisez le filtre passe-bas numérique intégré du capteur, configuré de manière appropriée pour votre application.
Une autre erreur est de négliger la dérive de chauffe du gyroscope. Le décalage change significativement durant les premières minutes après l’allumage, car l’appareil se chauffe automatiquement par dissipation interne de puissance. Pour les applications nécessitant des lectures précises immédiates après mise sous tension, il faut soit maintenir le gyroscope en mode veille à faible puissance, soit caractériser le profil de chauffement et compenser en conséquence.
Ne pas valider les performances du gyroscope dans des conditions réelles de fonctionnement est sans doute l’oubli le plus grave. Les essais au laboratoire à température ambiante avec une rotation manuelle douce offrent une confiance limitée. Testez votre conception sur toute la plage de températures, soumettez-la aux profils de chocs et vibrations attendus, et vérifiez les performances sur de longues périodes de fonctionnement afin de détecter des problèmes de dérive de polarisation et de sensibilité environnementale.
6. Considérations sur la chaîne d’approvisionnement et l’approvisionnement
La disponibilité des gyroscopes, les délais d’exécution et la gestion du cycle de vie ont un impact significatif sur les délais de développement des produits et la scalabilité de la fabrication. Comprendre le paysage de la chaîne d’approvisionnement aide à atténuer les risques.
Principaux fournisseurs et position sur le marché
Le marché des gyroscopes MEMS est dominé par plusieurs fournisseurs clés : Bosch Sensortec, STMicroelectronics, TDK InvenSense (désormais intégré à TDK), Analog Devices et Murata. Chacun présente ses points forts différents — Bosch et ST se concentrent fortement sur les marchés grand public et automobile avec des pièces à fort volume et optimisées en termes de coût. TDK InvenSense a été pionnier de nombreux gyroscopes MEMS grand public. Analog Devices propose des options de performance plus élevées pour les applications industrielles et de précision.
Pour les produits grand public, les pièces de Bosch (série BMI) et ST (série LSM) offrent généralement la meilleure combinaison de performance, de coût et de disponibilité. Pour les applications automobiles nécessitant la qualification AEC-Q100, ST, Bosch et TDK disposent tous de portefeuilles qualifiés. Les applications industrielles bénéficient souvent des plages de température plus larges d’Analog Devices et de leurs engagements de cycle de vie plus longs.
Délais d’exécution et gestion des stocks
Les capteurs gyroscopiques standards ont généralement des délais allant de disponibilité en stock à 12 à 16 semaines, selon les conditions du marché et les fluctuations de la demande. Les variantes qualifiées automobile ont souvent des délais plus longs en raison d’exigences supplémentaires de tests et de qualification. Prévoyez des délais de 20 à 26 semaines pour les capteurs de qualité automobile pendant les périodes d’approvisionnement limitées.
Pour la production prototype et à faible volume, acheter auprès de distributeurs comme Digi-Key, Mouser ou Arrow offre une disponibilité immédiate mais à des coûts unitaires plus élevés. Des volumes de production supérieurs à 10 000 unités par an justifient souvent des relations directes avec les fournisseurs, qui offrent de meilleurs prix, une meilleure visibilité dans les délais de livraison et un accès au support technique.
| Fournisseur | Focus sur le consommateur | Catégorie Automobile | Grade industriel | MOQ typique (Direct) | Délai d’exécution (Stock) |
|---|---|---|---|---|---|
| Bosch Sensortec | Haut | Haut | Moyen | 3 000-5 000 | Stock - 12 semaines |
| STMicroélectronique | Haut | Haut | Haut | 2 500-5 000 | Stock - 16 semaines |
| TDK InvenSense | Haut | Moyen | Moyen | 5 000-10 000 | Stock - 12 semaines |
| Dispositifs analogiques | Moyen | Moyen | Haut | 1 000-2 500 | Stock - 20 semaines |
| Murata | Moyen | Haut | Haut | 5 000-10 000 | 12 - 20 semaines |
Obsolescence et Parties Alternatives
Les gyroscopes MEMS ont des cycles de vie des produits allant de 5 à 7 ans pour les pièces destinées au consommateur à 10 à 15 ans pour les dispositifs industriels et automobiles. Vérifiez les engagements de longévité du fabricant, en particulier pour les produits qui devraient rester en production pendant de nombreuses années.
Concevez des alternatives compatibles aux broches lorsque cela est possible. De nombreux gyroscopes de la famille d’un fournisseur partagent des broches et des protocoles de communication, vous permettant de remplacer par une autre qualité de performance ou une génération avec un minimum de modifications du PCB. Pour les applications critiques, validez au moins une pièce alternative pendant la phase de conception afin d’avoir une sauvegarde qualifiée si votre choix principal rencontre des contraintes d’approvisionnement ou une fin de vie.
Lorsqu’un gyroscope atteint la fin de vie, les fournisseurs fournissent généralement un préavis de 6 à 12 mois et proposent des opportunités d’achat de dernière fois. Préparez un plan de migration, incluant les modifications du firmware nécessaires pour supporter le capteur de remplacement et toute recalibration nécessaire pour votre application.
7. FAQ
Quelle est la différence entre un gyroscope et un accéléromètre ?
Un gyroscope mesure la vitesse angulaire (vitesse de rotation) autour d’un ou plusieurs axes, tandis qu’un accéléromètre mesure l’accélération linéaire. Les gyroscopes détectent la vitesse de rotation d’un objet, tandis que les accéléromètres détectent les variations de vitesse ou d’orientation par rapport à la gravité. La plupart des systèmes de détection de mouvement combinent les deux capteurs dans une IMU (unité de mesure inertielle) pour suivre à la fois le mouvement linéaire et rotationnel. L’utilisation simultanée des deux types de capteurs permet un suivi de position et d’orientation plus précis que chacun seul.
Comment convertir la sortie du gyroscope en angle ?
La sortie du gyroscope est la vitesse angulaire, qui doit être intégrée dans le temps pour obtenir l’angle. Dans les systèmes discrets, multipliez la lecture de la vitesse angulaire par l’intervalle de temps entre les échantillons et additionnez ces incréments. Par exemple, si votre gyroscope indique 10 °/s et que vous échantillonnez à 100 Hz, chaque échantillon représente 0,1° de rotation. Cependant, l’intégration accumule toutes les erreurs, y compris le bruit et la dérive de polarisation, ce qui entraîne une dérive des estimations d’angle au fil du temps. La plupart des systèmes pratiques fusionnent les données du gyroscope avec des relevés d’accéléromètre ou de magnétomètre pour déterminer cette dérive.
Que signifie la spécification de stabilité des biais pour mon application ?
La stabilité de polarisation représente l’ampleur de l’écart à taux zéro qui dérive au fil du temps, généralement spécifié en °/h. Cette dérive limite directement la durée pendant laquelle vous pouvez intégrer les données du gyroscope avant que l’erreur d’angle accumulée ne devienne inacceptable. Un gyroscope avec une stabilité de polarisation de 10 °/h peut dériver de 10 degrés en une heure même lorsqu’il est parfaitement immobile. Pour les mesures de courte durée (secondes à minutes), la stabilité de polarisation a un impact minimal. Pour les applications nécessitant une orientation précise sur plusieurs heures sans mises à jour de référence externes, la stabilité des polarisations devient la source d’erreur dominante et il faut des gyroscopes de qualité tactique ou de navigation de qualité.
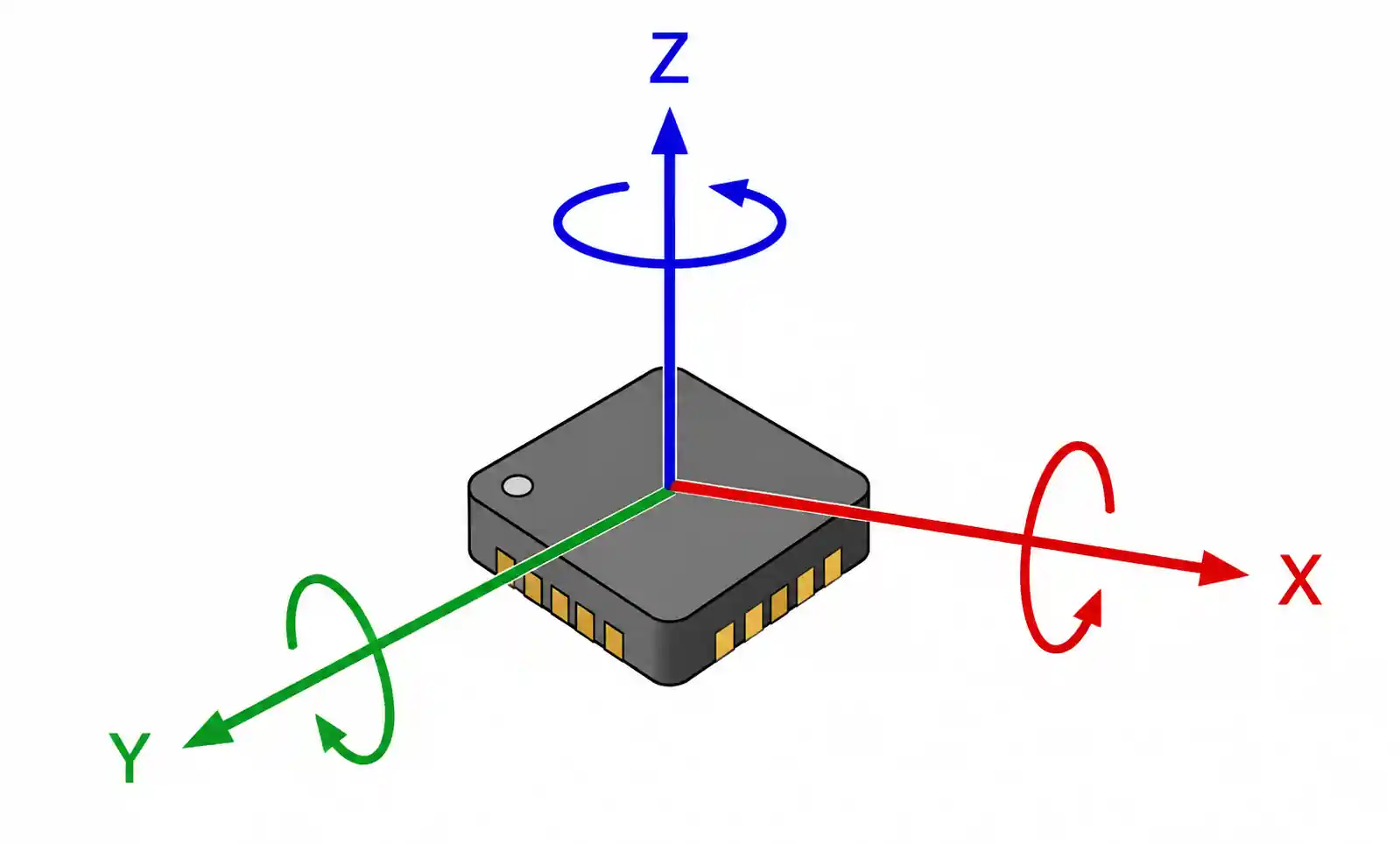
Puis-je utiliser un gyroscope 3 axes à la place de trois capteurs à un seul axe ?
Oui, et c’est l’approche standard dans les conceptions modernes. Un gyroscope MEMS à 3 axes intègre trois éléments de détection dans un seul ensemble, mesurant simultanément la vitesse angulaire autour des axes X, Y et Z. Cela offre des avantages significatifs : une empreinte de circuit imprimée plus réduite, une consommation d’énergie réduite, un nombre réduit de composants et un meilleur alignement des axes par rapport à trois capteurs discrets. La principale considération est que les trois axes partagent des interfaces d’alimentation et de communication communes, donc vous ne pouvez pas configurer chaque axe de manière indépendante si votre application nécessite des plages ou des bandes passantes différentes par axe.
Comment gérer la calibration initiale du décalage ?
Effectuer un étalonnage à taux zéro lorsque le système est immobile, idéalement après que le gyroscope ait atteint l’équilibre thermique (généralement 2 à 5 minutes après l’allumage). Collectez 50 à 100 échantillons à votre débit de données de fonctionnement normal, moyennez-les pour réduire le bruit, et stockez cette moyenne sous forme de correction de décalage. Soustrayez ce décalage de toutes les lectures ultérieures. Recalibrez chaque fois que le système démarre à l’état éteint ou si la température de fonctionnement change significativement. Pour les appareils grand public, déclenchez le recalibrage lorsque le système détecte une période stationnaire (tous les capteurs montrent un changement minimal pendant plusieurs secondes). Pour les applications industrielles, mettez en place une procédure d’étalonnage formelle dans le cadre des routines de démarrage ou de maintenance.
Quel taux d’échantillonnage dois-je utiliser pour mon gyroscope ?
Sélectionnez une fréquence d’échantillonnage au moins 4 à 5 fois supérieure à celle du mouvement à la plus haute fréquence que vous devez mesurer. Pour le suivi du mouvement humain, 100-200 Hz suffit. Pour la robotique à grande vitesse ou la surveillance des vibrations, 1 à 4 kHz peut être nécessaire. Des taux d’échantillonnage plus élevés permettent un meilleur filtrage numérique et réduisent le bruit de quantification, mais augmentent la consommation d’énergie et les besoins en traitement des données. De nombreux gyroscopes offrent des débits de données de sortie configurables — commencez par un taux plus élevé lors du développement pour capter un contenu inattendu à haute fréquence, puis réduisez au débit minimum nécessaire pour la production afin d’optimiser la consommation d’énergie.
Les gyroscopes de qualité automobile sont-ils nécessaires pour toutes les applications automobiles ?
Pour les systèmes critiques pour la sécurité ou directement liés au contrôle du véhicule (ESC, ADAS, déploiement des airbags), les capteurs certifiés AEC-Q100 sont généralement exigés par les constructeurs automobiles et sont souvent imposés par des normes de sécurité fonctionnelle telles que l’ISO 26262. Pour des applications non liées à la sécurité comme le contrôle gestuel du système d’infodivertissement ou la stabilisation des dashcams, des capteurs industriels peuvent convenir selon les besoins de votre client. Cependant, même les applications automobiles non critiques doivent résister à des cycles de température élevés, à une fiabilité à long terme et à une exposition aux environnements électromagnétiques automobiles. L’utilisation de pièces qualifiées automobiles simplifie la qualification et réduit le risque de défaillance sur le terrain, même lorsque ce n’est pas strictement obligatoire.
Comment protéger le gyroscope des chocs mécaniques pendant le transport ?
Les gyroscopes MEMS sont généralement résistants aux chocs mécaniques lorsqu’ils ne sont pas alimentés, supportant généralement 10 000 g ou plus. Cependant, un choc lors de l’opération (lorsque les éléments de détection sont en mouvement) présente un risque plus élevé. Concevez votre montage de PCB pour isoler le capteur des impacts et des chutes du boîtier. Utilisez un revêtement conformateur ou des caches protecteurs si le capteur est exposé. Pour les produits livrés avec des batteries installées (gyroscope potentiellement alimenté), assurez-vous d’un amorti d’emballage adéquat et testez votre conception selon les normes d’emballage IETM ou les spécifications équivalentes de test de chute pertinentes pour votre catégorie de produits.
8. Conclusion
Choisir un gyroscope repose sur des compromis : portée, bruit, stabilité de polarisation et puissance. Des choses grand public ? Optez pour des produits abordables et peu puissants. Industriel ou automobile ? Il faut une stabilité à long terme et un fonctionnement à haute température. Trouvez le bon équilibre et vous ne serez pas trop précisé.
Pour la rotation de l’écran, le suivi gestuel ou l’activité, les gyroscopes MEMS grand public de Bosch ou ST dans la gamme ±500 à ±2000 dps font généralement le travail. Pour la robotique, la stabilisation de la caméra ou tout ce qui nécessite une précision sub-degré sur le long terme, il faut rechercher une stabilité de polarisation inférieure à 10 °/h et une densité de bruit inférieure à 0,015 °/s/√Hz.
En résumé : commencez par des exigences claires — portée, précision, température, puissance, durée de vie. Filtrez les candidats, puis testez les meilleurs choix dans des conditions réelles. Cette approche systématique vous donne un gyroscope qui fonctionne, travaille en production et reste supportable tout au long de la vie de votre produit.