

Guide de sélection des starters en mode commun : comment choisir le bon composant pour la suppression des EMI
Table des matières
- [Qu’est-ce qu’un Étranglement en mode commun et pourquoi il est important] (#1-qu’est-un-étranglement en mode commun et pourquoi c’est important)
- Paramètres techniques clés expliqués
- Comment sélectionner le bon choke en mode commun pour votre application
- Comparaison des performances par application
- [Considérations de conception et pièges courants] (#5-considérations-et-pièges-courants)
- [Considérations sur la chaîne d’approvisionnement et l’approvisionnement] (#6-Considérations de la chaîne d’approvisionnement et des approvisionnements)
- FAQ
- [Conclusion et prochaines étapes] (#8-conclusion-et-prochaines-étapes)
1. Qu’est-ce qu’un étranglement en mode commun et pourquoi il est important
Un starter en mode commun est un composant de filtre à interférences électromagnétiques passives (EMI) conçu pour supprimer le bruit en mode commun tout en permettant le passage des signaux en mode différentiel avec une atténuation minimale. En termes pratiques, elle empêche les courants de bruit de haute fréquence circulant dans la même direction sur les deux lignes de signal de rayonner ou de se coupler dans des circuits sensibles.
Les starters de mode commun sont essentiels dans les conceptions électroniques modernes car des normes réglementaires telles que la FCC Part 15, CISPR 32 et EN 55032 exigent des limites strictes sur les émissions conduites et rayonnées. Sans un filtrage en mode commun approprié, les produits peuvent échouer aux tests EMC, retardant l’entrée sur le marché et augmentant les coûts de conformité. Dans les interfaces numériques à haute vitesse telles que l’USB, le HDMI, l’Ethernet et le bus CAN, les selfs en mode commun protègent l’intégrité du signal tout en garantissant que le système répond aux exigences de compatibilité électromagnétique.
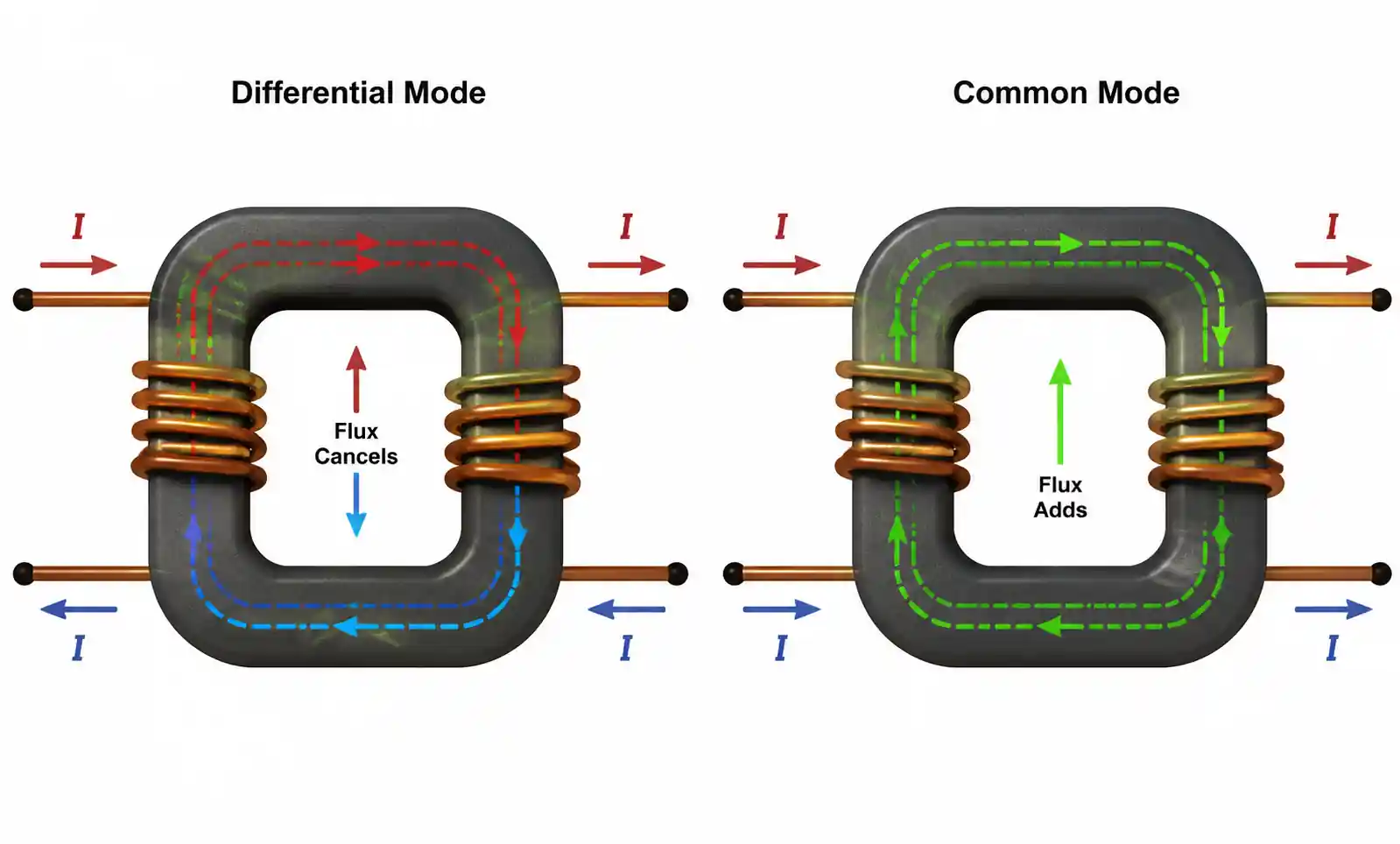
La conception du noyau d’un choke en mode commun consiste en deux enroulements ou plus enroulés sur un noyau magnétique commun, généralement de la ferrite ou de la poudre de fer. Lorsque des signaux en mode différentiel traversent la composante, les champs magnétiques s’annulent, ce qui entraîne une faible impédance et une dégradation minimale du signal. Cependant, lorsque les courants en mode commun circulent, les champs magnétiques s’additionnent de manière constructive, créant une forte impédance qui bloque le bruit indésirable. Ce comportement rend les chokes en mode courant fondamentalement différents des inducteurs en mode différentiel, où les deux enroulements contribuent au filtrage du signal.
Dans les applications pratiques, les ingénieurs doivent équilibrer plusieurs exigences concurrentes : impédance en mode commun adéquate sur toute la plage de fréquences d’intérêt, faibles pertes d’insertion en mode différentiel pour préserver la qualité du signal, capacité de gestion suffisante du courant, empreinte compacte pour des configurations de PCB denses, et rentabilité pour une production à grand volume. Comprendre ces compromis est essentiel pour réussir le choix des composants.
2. Paramètres techniques clés expliqués
Sélectionner le bon choke en mode commun nécessite de comprendre les paramètres critiques qui apparaissent dans les fiches techniques. Chaque spécification a des implications directes sur la performance du circuit, et une mauvaise interprétation de ces valeurs est une source fréquente d’erreurs de conception.
Impédance en mode commun (Zcm)
L’impédance en mode commun est la principale mesure de performance pour un choke en mode commun. Elle représente l’opposition aux courants en mode commun à une fréquence spécifique, généralement mesurée à 25 MHz ou 100 MHz. Une impédance plus élevée offre une meilleure suppression du bruit, mais la courbe d’impédance varie significativement avec la fréquence en raison de la capacité parasite et des caractéristiques du matériau du noyau. Lorsque vous évaluez les fiches techniques, vérifiez toujours la valeur d’impédance à la fréquence où votre problème EMI survient, pas seulement à la spécification principale.
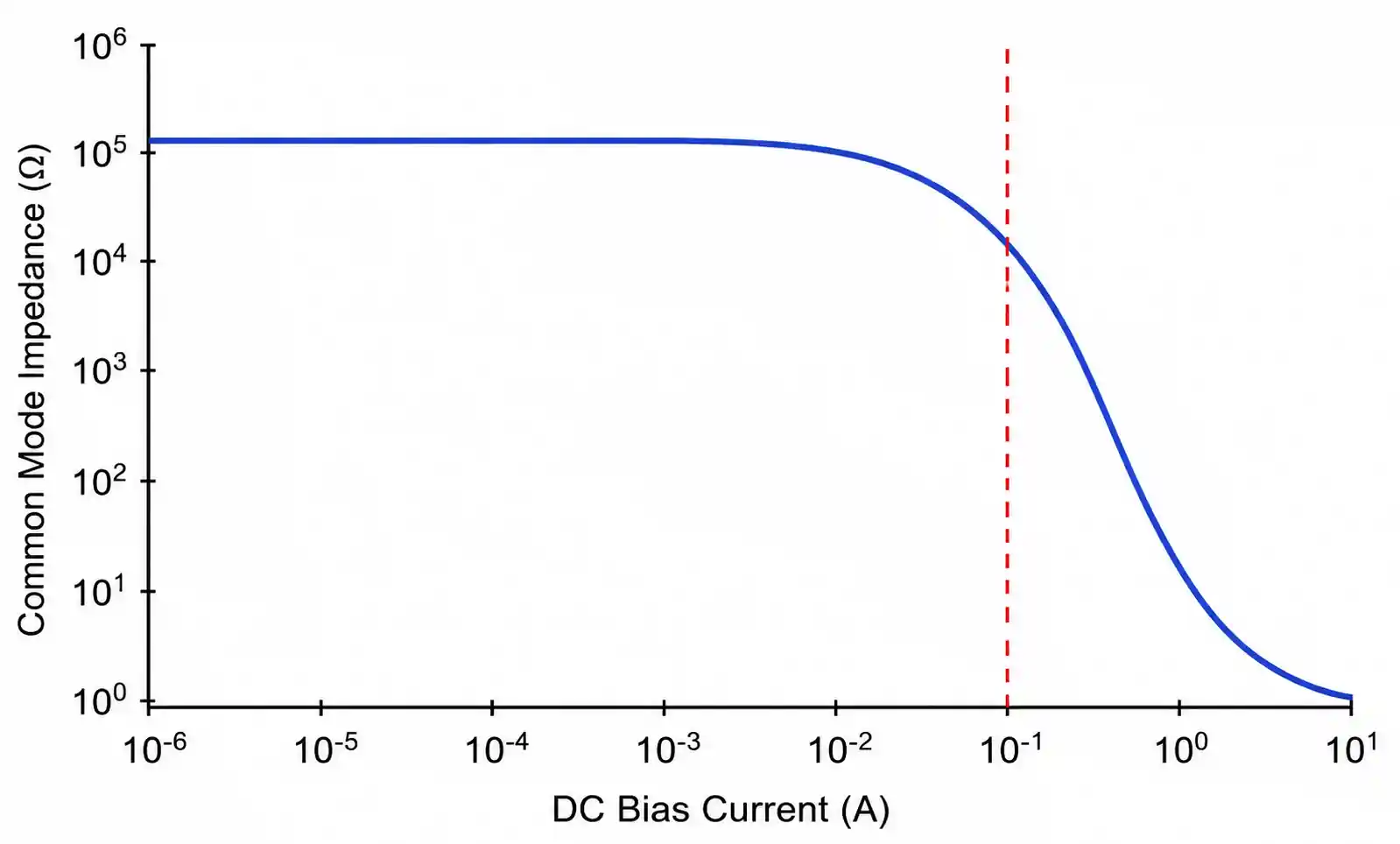
Courant nominal (Insouciant)
La puissance nominale de courant continu indique le courant continu maximal que le choke peut supporter avant que la saturation ne réduise son efficacité. Dépasser cette valeur provoque la saturation du noyau magnétique, réduisant considérablement l’impédance en mode commun. Dans les applications de distribution de puissance comme la recharge USB ou le PoE, les ingénieurs choisissent souvent par erreur les selfs uniquement en fonction de l’impédance, pour découvrir que le composant sature sous un courant de fonctionnement normal. Vérifiez toujours que le courant nominal dépasse le courant de charge maximal attendu avec une marge suffisante.
[IMG_2]
Perte d’insertion en mode différentiel
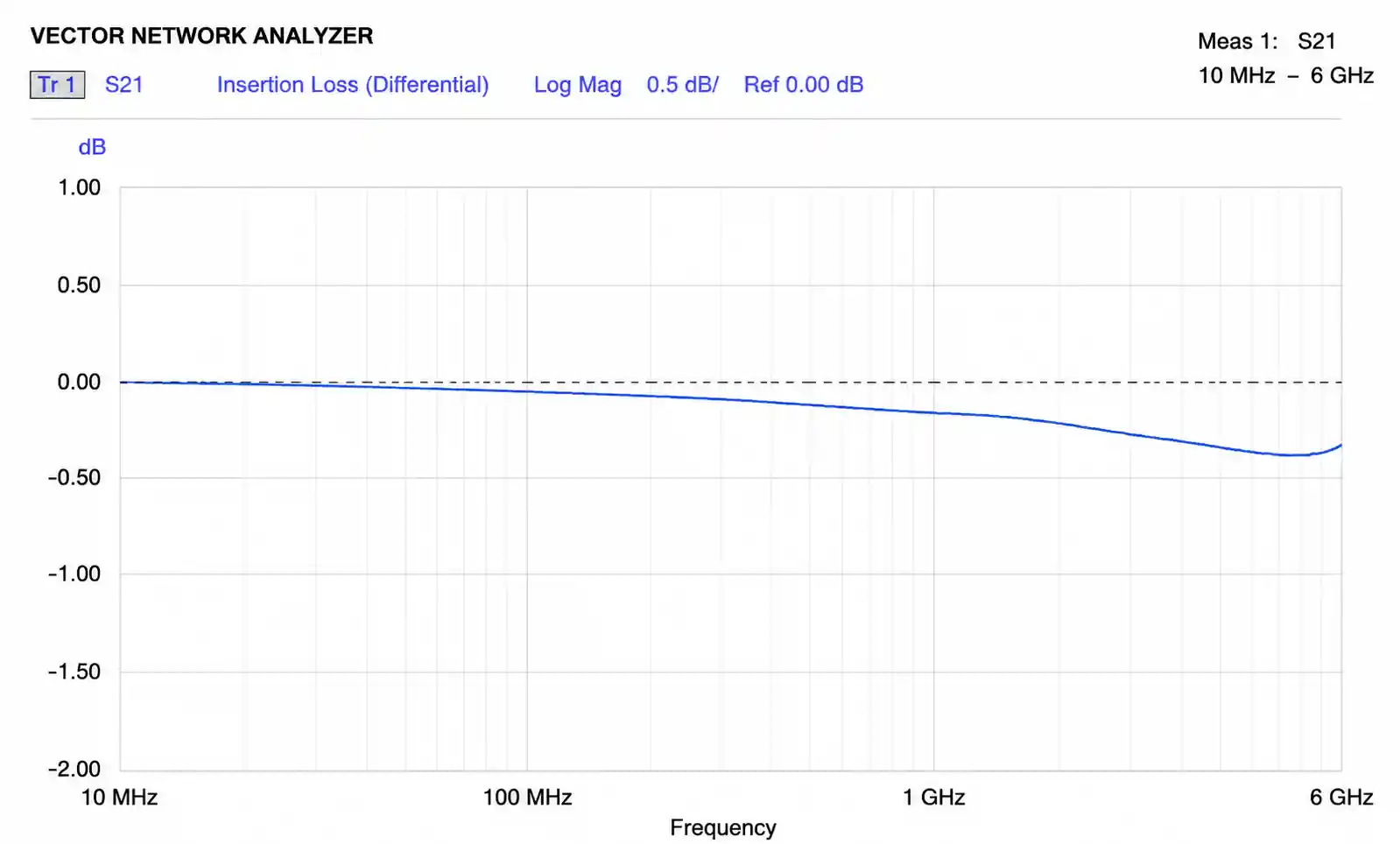
Bien que les chokes en mode commun soient conçus pour bloquer le bruit en mode commun, ils introduisent inévitablement une perte d’insertion aux signaux différentiels. Pour les interfaces de données à haute vitesse, une perte excessive de modes différentiels peut entraîner des problèmes d’intégrité du signal, entraînant des erreurs de bits ou des défaillances de liaison. Le principal défi de conception est d’atteindre une impédance en mode commun suffisante sans dégrader le signal différentiel. Dans les applications USB 3.0 et Ethernet, la perte d’insertion en mode différentiel doit généralement rester inférieure à 0,5 dB à la fréquence du signal pour maintenir des performances acceptables.
Capacité parasite
La capacité d’enroulement inter-enroulant et la capacité enroulement-noyau créent des chemins indésirables à faible impédance à haute fréquence. Cette capacité parasite limite la plage de fréquences effective du choke, ce qui fait baisser l’impédance au-delà d’une certaine fréquence. Dans les conceptions visant la suppression au-dessus de 500 MHz, comme HDMI 2.1 ou USB4, une faible capacité parasite devient critique. Les fiches techniques spécifient souvent la capacité d’enroulement, qui doit être minimisée pour les applications à haute fréquence.
Inductance de fuite
L’inductance par fuite représente la portion d’inductance qui ne se couple pas magnétiquement entre les enroulements. Bien que les chokes en mode courant soient conçus pour un accouplement serré, certaines fuites sont inévitables. Une inductance de fuite excessive peut provoquer une distorsion du signal en mode différentiel, en particulier dans les interfaces numériques à haute vitesse. Pour les applications Ethernet gigabit et USB, l’inductance de fuite doit généralement être inférieure à 1 μH pour éviter la dégradation de la qualité du signal.
3. Comment sélectionner le bon choke en mode commun adapté à votre application
Le choix d’un choke en mode commun implique une méthodologie systématique qui prend en compte à la fois les exigences de performance EMI et les contraintes d’intégrité du signal. L’approche suivante a été validée dans les domaines automobile, industriel et électronique grand public.
Étape 1 : Identifier la plage de fréquences d’intérêt
Commencez par déterminer où se situe votre problème d’EMI. Les émissions conduites s’étendent généralement de 150 kHz à 30 MHz, tandis que les émissions rayonnées vont de 30 MHz à plusieurs GHz. Utilisez des tests ou simulations préalables à la conformité pour identifier les bandes de fréquences où le bruit dépasse les limites réglementaires. Le choke en mode commun doit fournir une impédance adéquate sur toute cette plage, et non seulement à une seule fréquence de test.
Étape 2 : Calculer l’impédance en mode commun requise
L’impédance requise dépend de la magnitude du courant de bruit et du niveau d’atténuation acceptable. Une règle générale est que chaque doublement de l’impédance fournit environ 6 dB de suppression supplémentaire. Par exemple, si votre marge de bruit est de -15 dB et que vous devez atteindre une marge de +5 dB, vous avez besoin d’environ 20 dB d’atténuation, correspondant à une augmentation d’impédance de 10×. Ce calcul doit être effectué à la fréquence où se produit l’EMI dans le pire des cas.
Étape 3 : Vérifier la classification de courant et les caractéristiques de saturation
Mesurer ou calculer le courant continu maximal circulant à travers le choke sous toutes les conditions de fonctionnement, y compris les événements transitoires. Sélectionnez un composant dont le courant nominal est au moins 20 % supérieur à ce maximum pour éviter la saturation. Pour les applications avec de fortes variations de courant, comme la livraison d’énergie USB, examinez la courbe inductance versus courant continu dans la fiche technique afin de s’assurer que l’impédance en mode commun reste adéquate même en conditions de charge de pointe.
Étape 4 : Évaluer la performance des modes différentiels
Pour les interfaces de signal, vérifiez que la perte d’insertion en mode différentiel reste acceptable sur toute la bande passante du signal. Demandez les données des paramètres S au fabricant si disponibles, ou effectuez des mesures à l’aide d’un analyseur de réseau vectoriel. Faites particulièrement attention à la perte de retour, qui indique l’adaptation d’impédance. Une faible perte de retour peut provoquer des réflexions qui dégradent la qualité du signal même si la perte d’insertion semble acceptable.
Étape 5 : Considérez la disposition du circuit imprimé et les contraintes du boîtier
La taille du boîtier, le style de montage et la configuration des broches influencent à la fois la performance électrique et la fabricabilité. Les composants montés en surface simplifient l’assemblage automatisé mais peuvent avoir une capacité parasite plus élevée que les alternatives à trou traversant. Dans les conceptions à contraintes d’espace, les boîtiers compacts sont attrayants, mais les composants plus petits ont souvent des courants nominales plus faibles et une impédance réduite. Vérifiez toujours que l’empreinte sélectionnée est compatible avec le processus d’empilement et d’assemblage de vos PCB.
| Critères de sélection | Priorité pour les données à haute vitesse | Priorité pour les lignes électriques | Priorité pour l’automobile CAN |
|---|---|---|---|
| Impédance en mode commun à 100 MHz | Haut | Moyen | Haut |
| Perte d’insertion en mode différentiel | Critique | Low | Haut |
| Note actuelle | Moyen | Critique | Moyen |
| Plage de température de fonctionnement | Moyen | Haut | Critique |
| Protection ESD | Haut | Moyen | Critique |
| Taille du paquet | Moyen | Low | Moyen |
Ce tableau illustre comment les priorités des paramètres évoluent selon l’application. Les interfaces de données à haute vitesse exigent une perte minimale en mode différentiel, le filtrage par ligne électrique privilégie la gestion du courant, et les applications automobiles nécessitent une plage de température étendue et une protection ESD robuste. Choisir à l’aveugle un choke uniquement en fonction de l’impédance en mode commun sans prendre en compte ces facteurs spécifiques à l’application est une erreur de conception courante.
4. Comparaison des performances par application
Différentes applications imposent des exigences distinctes aux chokes en mode commun. La comparaison suivante aide les ingénieurs à adapter les caractéristiques des composants à leur cas d’usage spécifique.
| Application | Plage de fréquences | Impédance typique | Courant noté | Défi clé | Matériel de base recommandé | |---|---|---|---|---| | USB 2.0 / 3.0 | 10 MHz - 1 GHz | 100 - 600 Ω @ 100 MHz | 0,5 - 3 A | Maintien de l’intégrité du signal | Ferrite Ni-Zn | | Ethernet Gigabit | 1 MHz - 500 MHz | 200 - 1000 Ω @ 100 MHz | 0,35 - 1 A | Faible perte de modes différentiels | Ferrite Mn-Zn | | HDMI 2.0 / 2.1 | 100 MHz - 6 GHz | 50 - 300 Ω @ 1 GHz | 0,25 - 0,5 A | Capacité ultra-basse | Ferrite Ni-Zn | | Entrée AC de l’alimentation | 150 kHz - 30 MHz | 1000 - 5000 Ω @ 1 MHz | 3 - 20 A | Courant élevé, pas de saturation | Mn-Zn ou nanocristalline | | Bus CAN (automobile) | 1 MHz - 100 MHz | 200 - 800 Ω @ 100 MHz | 0,5 - 2 A | Stabilité de la température, ESD | Ferrite Ni-Zn | | RS-485 industriel | 1 MHz - 50 MHz | 300 - 1000 Ω @ 10 MHz | 0,25 - 1 A | Robuste contre les transitoires | Ferrite Mn-Zn |
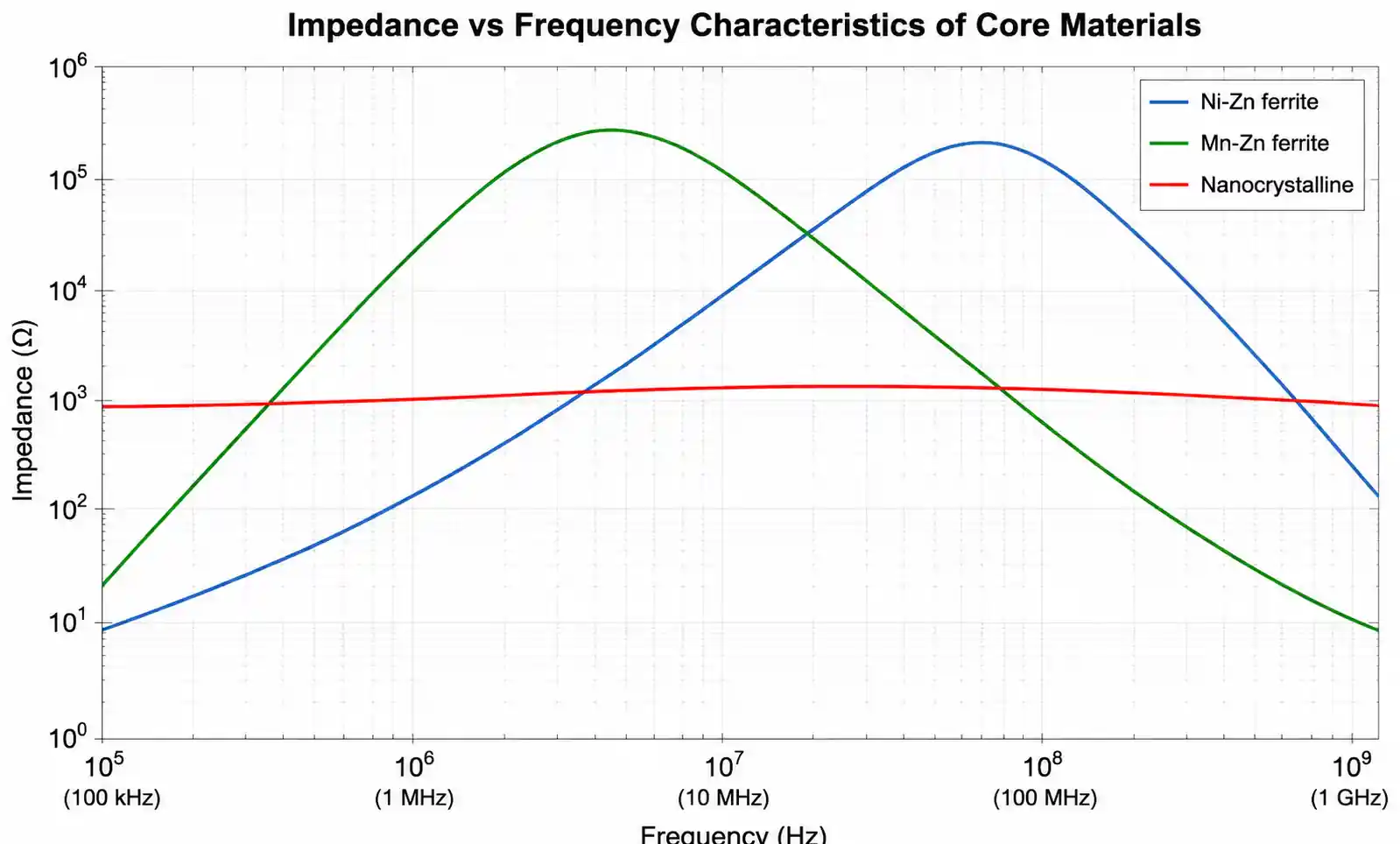
Le choix du matériau du noyau impacte considérablement la réponse en fréquence et la stabilité de la température. Les matériaux de ferrite Ni-Zn offrent une forte impédance à des fréquences supérieures à 50 MHz et une faible capacité parasite, ce qui les rend idéaux pour les interfaces numériques à haute vitesse. Cependant, ils ont une capacité de gestion du courant limitée en raison d’une densité de flux de saturation plus faible. La ferrite Mn-Zn offre de meilleures performances à basses fréquences (1-50 MHz) et à des courants plus élevés, mais présente des pertes de cœur supérieures à 100 MHz. Pour le filtrage des lignes électriques où un courant élevé est essentiel, les carottes nanocristallines offrent d’excellentes caractéristiques de saturation mais à un coût nettement plus élevé.
Dans les applications USB 3.0, une conception typique peut utiliser un choke en mode commun avec 300 Ω à 100 MHz et un courant nominal de 1 A. Cela assure une suppression adéquate des EMI tout en maintenant une perte d’insertion en mode différentiel inférieure à 0,3 dB jusqu’à 5 GHz, assurant une transmission fiable des données SuperSpeed. À l’inverse, une application Ethernet où 500 Ω à 100 MHz est souvent nécessaire pour respecter les limites CISPR 32 de classe B, mais le débit de données plus faible permet une tolérance de perte d’insertion légèrement supérieure.
5. Considérations de conception et pièges courants
Même les ingénieurs expérimentés font des erreurs en intégrant des starters en mode commun. Les problèmes suivants représentent les plus fréquents rencontrés lors des tests et de la production EMC.
Erreurs de disposition du PCB
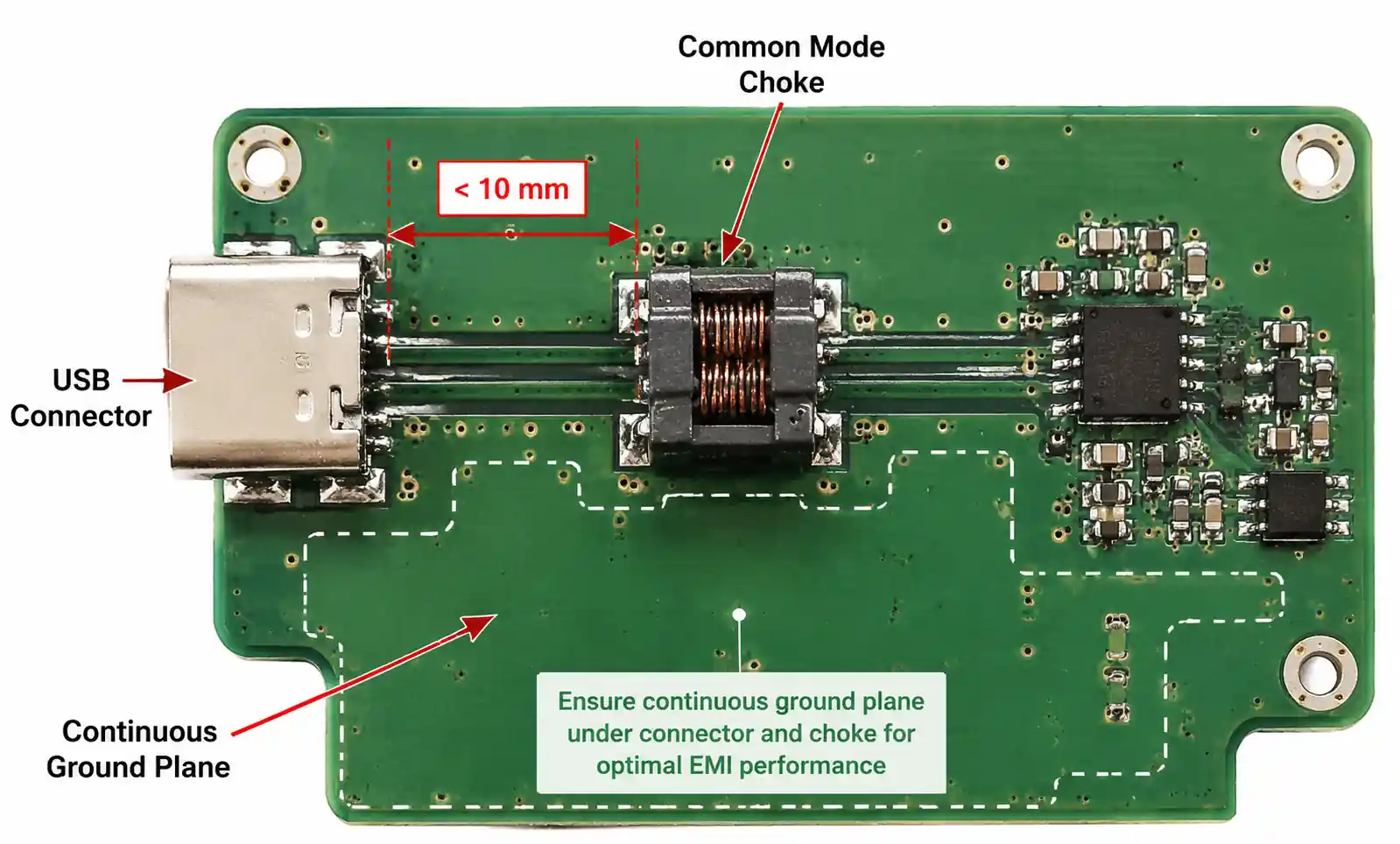
Placer le gouvernement en mode commun trop loin du connecteur ou du point de fixation du câble réduit considérablement son efficacité. Les courants en mode commun peuvent rayonner des pistes du PCB avant d’atteindre le composant du filtre. La meilleure pratique est de positionner le starter à moins de 10 mm du connecteur, sans discontinuité dans le plan de masse entre eux. De plus, évitez de router les signaux haute fréquence près du choke, car le couplage capacitif peut créer de nouveaux chemins EMI contournant le filtre.
Ignorer les effets de saturation
De nombreux modèles échouent aux tests EMC dans des conditions de courant élevé car les ingénieurs sélectionnent les chokes uniquement en fonction du courant nominal de fonctionnement. Les événements transitoires, les courants d’appel et les conditions de défaut peuvent temporairement faire entrer le composant en saturation. Lorsque le noyau sature, l’impédance en mode commun chute drastiquement, parfois de 10 à 20 dB, éliminant ainsi l’effet de filtrage souhaité. Vérifiez toujours les performances dans les pires conditions de courant, pas seulement la charge typique.
Impédance déséquilibrée
Dans les interfaces différentielles à haute vitesse, le starter en mode commun ne doit pas perturber l’impédance caractéristique de la ligne de transmission. Les discontinuités provoquent des réflexions qui dégradent la qualité du signal et réduisent le débit effectif des données. L’impédance en mode différentiel du choke doit correspondre à l’impédance ligne (typiquement 90 Ω pour USB, 100 Ω pour Ethernet). Cela nécessite une sélection minutieuse de l’inductance de fuite et de la géométrie de montage pour maintenir la continuité de l’impédance.
Couverture de fréquences insuffisante
Une erreur fréquente est de sélectionner un choke avec une excellente impédance à la fréquence de test (par exemple, 100 MHz) mais avec de mauvaises performances à la fréquence réelle du problème. Les émissions EMI se produisent rarement à une seule fréquence ; ils apparaissent généralement sous forme de bruit à large bande ou d’harmoniques couvrant une large plage. Vérifiez toujours la courbe impédance par rapport à la fréquence pour garantir une suppression adéquate sur toute la bande où votre bruit dépasse les limites. Un composant avec 600 Ω à 100 MHz mais seulement 50 Ω à 30 MHz peut ne pas résoudre un problème d’émissions conduites à la fréquence basse.
Négliger les effets de la température
La perméabilité du noyau et donc l’impédance en mode commun varient avec la température. Les matériaux de ferrite Ni-Zn présentent généralement une réduction d’impédance de 20 à 30 % à 85°C contre 25°C. Dans les environnements automobiles ou industriels où les températures de fonctionnement atteignent 105°C ou plus, cette dégradation doit être prise en compte dans la marge de conception. Certains ingénieurs découvrent lors des essais thermiques que leur marge EMC disparaît à des températures élevées, nécessitant une refonte coûteuse.
| Erreur courante | Conséquence | Comment éviter |
|---|---|---|
| Starter placé à >20 mm du connecteur | Suppression des EMI réduite | Position à moins de 10 mm du connecteur |
| Sélectionné uniquement sur la base de l’impédance @25°C | Échec de la CEM à haute température | Vérifier l’impédance à la température maximale de fonctionnement |
| Marge de notation courante insuffisante | Saturation sous charge de pointe | Utilisez une marge courante minimale de 20-30 % |
| Perte de modes différentiels ignorée | Problèmes d’intégrité du signal, augmentation du BER | Vérifiez les paramètres S21 sur le signal BW |
| Contrôle d’impédance à fréquence unique | Filtrage à bande étroite, EMI persiste | Examinez la courbe d’impédance complète 1-1000 MHz |
6. Considérations sur la chaîne d’approvisionnement et l’approvisionnement
Au-delà des spécifications techniques, les considérations pratiques concernant la disponibilité, le coût et la seconde source influencent le choix des composants, en particulier dans la production à grande volée.
Délai d’exécution et disponibilité
Les starters en mode courant, en particulier ceux avec des matériaux de noyau spécialisés ou des courants élevés, ont souvent des délais de livraison de 12 à 16 semaines ou plus. Pendant les périodes de pénurie de composants, les délais peuvent atteindre 26+ semaines. Les ingénieurs devraient identifier plusieurs sources qualifiées lors de la phase de conception plutôt que d’attendre la reprise de la production. Vérifiez les niveaux de stock des distributeurs pour le numéro de pièce spécifique, pas seulement la famille de produits, car la disponibilité varie considérablement même au sein d’une seule gamme de fabricants.
Compromis entre le coût et la performance
Les starters en mode commun premium avec des noyaux nanocristallins ou une construction à très faible capacité peuvent coûter 3 à 5 × plus que les conceptions en ferrite standard. Dans l’électronique grand public sensible aux coûts, le coût des composants doit être justifié soit par une réduction de la surface de la carte, soit par l’élimination d’étapes supplémentaires du filtre, soit par une marge EMC améliorée qui réduit le risque de conformité. Réaliser une analyse du coût total incluant l’espace de circuit imprimé, la main-d’œuvre d’assemblage et les itérations de tests EMC révèle souvent qu’un composant plus coûteux offre un coût global de programme plus bas.
Qualification et fiabilité
Pour les applications automobiles, médicales et industrielles, la qualification des composants dépasse les spécifications électriques pour inclure les tests mécaniques de contrainte, la résistance à l’humidité, le cycle thermique et la validation de fiabilité à long terme. La qualification AEC-Q200 pour les composants automobiles ajoute généralement 6 à 8 semaines aux calendriers d’élevage initial et augmente le coût des composants de 20 à 40 %. Cependant, cette qualification réduit considérablement le risque de défaillance sur le terrain et est souvent imposée par les clients automobiles de niveau 1.
Stratégies de seconde source
Compter sur un seul fabricant pour les starters en mode courant crée un risque dans la chaîne d’approvisionnement. Idéalement, qualifiez au moins deux sources de composants ayant des caractéristiques électriques similaires. Faites attention à la compatibilité des empreintes, car différents fabricants peuvent utiliser un espacement légèrement différent même pour des composants nominalement équivalents. Lors de l’évaluation des alternatives, comparez non seulement les spécifications principales mais aussi la courbe d’impédance complète, les coefficients de température et les caractéristiques de saturation afin d’assurer une véritable équivalence.
7. FAQ
Quelle est la différence entre les starters en mode commun et en mode différentiel ?
Les chokes en mode commun suppriment les courants de bruit circulant dans la même direction sur les deux conducteurs, tandis que les chokes en mode différentiel filtrent les courants circulant dans des directions opposées. Structurellement, les chokes en mode commun ont des enroulements étroitement couplés enroulés sur un noyau partagé, ce qui provoque l’annulation magnétique des signaux différentiels tandis que les courants en mode commun s’additionnent. En revanche, les inductances en mode différentiel utilisent des noyaux séparés ou des enroulements faiblement couplés pour bloquer les polarités des deux signaux de manière égale.
Comment calculer l’impédance en mode commun requise pour mon application ?
Commencez par mesurer la magnitude du courant de bruit à la fréquence où les limites EMI sont dépassées. L’impédance requise est égale à la chute de tension nécessaire pour atténuer ce courant à des niveaux acceptables. En règle générale, chaque augmentation de 10× d’impédance fournit environ 20 dB de suppression. Par exemple, si votre marge est de -10 dB à 100 MHz, ajouter un choke avec une impédance de 500 Ω permet généralement d’améliorer 15-20 dB, en supposant une impédance Ω de source de 25-50 à 50 dB.
Puis-je utiliser un starter en mode commun dans les applications automobiles (AEC-Q200) ?
Oui, mais vous devez sélectionner des composants spécifiquement qualifiés selon les normes AEC-Q200. Ces pièces subissent des tests supplémentaires, notamment la durée de vie de fonctionnement à haute température (HTOL), le cycle de température, les chocs mécaniques et la résistance à l’humidité. Tous les chokes de mode courant ne sont pas certifiés automobilement, alors vérifiez que la fiche technique indique explicitement la conformité AEC-Q200. De plus, les applications automobiles nécessitent souvent des plages de température étendues (-40°C à +125°C) et une robustesse ESD plus élevée (IEC 61000-4-2 Niveau 4).
Qu’est-ce qui cause la saturation du choke en mode commun et comment puis-je l’éviter ?
La saturation se produit lorsque la densité de flux du noyau magnétique atteint sa limite maximale, généralement causée par un courant continu excessif. Une fois saturée, la perméabilité du noyau chute drastiquement, réduisant l’impédance en mode commun de 80 à 90 %. Évitez la saturation en choisissant un choke dont le courant nominal est 20 à 30 % supérieur à votre courant maximal de fonctionnement, y compris les transitoires. Certains modèles utilisent des noyaux avec un espace d’air pour augmenter la résistance de saturation, bien que cela réduise l’impédance initiale.
Comment gérer les longs délais pour les starters spécialisés en mode commun ?
Pour les conceptions critiques avec des délais de livraison prolongés, considérez ces stratégies : prévoir la demande et passer des commandes anticipées en fonction des volumes projetés ; qualifier plusieurs fournisseurs lors de la phase de conception pour permettre des pivots rapides ; une conception avec des composants plus facilement accessibles, même si légèrement trop spécifiés ; maintenir le stock tampon pour l’accélération de la production ; Engagez les distributeurs dès le début pour les engagements d’allocation. Dans certains cas, repenser le réseau de filtres pour utiliser des valeurs de composants plus courantes réduit le risque d’approvisionnement.
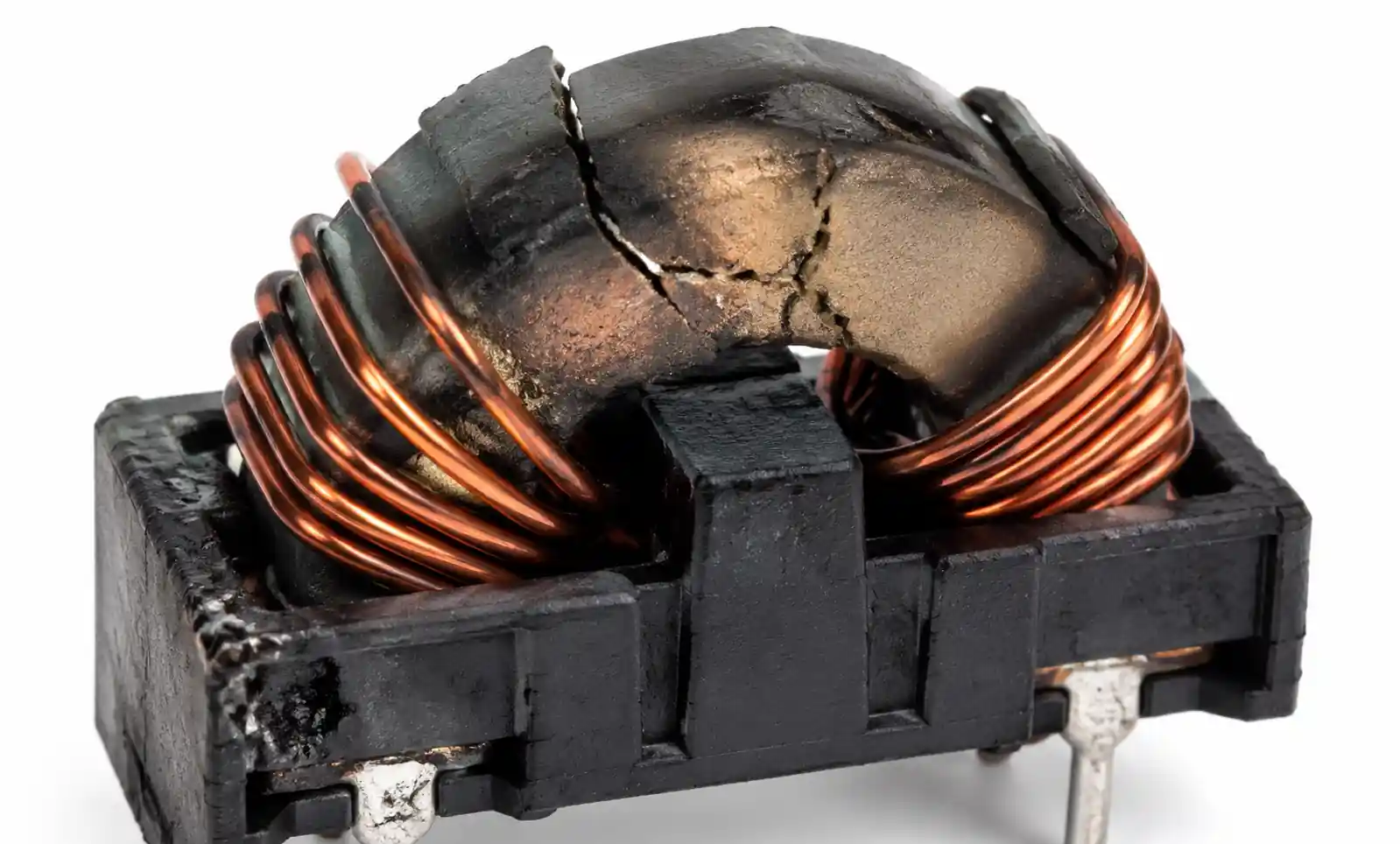
Quels sont les modes de défaillance courants pour les starters en mode commun ?
Les modes de défaillance les plus fréquents incluent des dommages thermiques dus à un surcourant (visible comme une ferrite décolorée ou fissurée), des fractures mécaniques dues à la flexion ou au choc du circuit imprimé (environnements automobiles), et l’ouverture des enroulements due à la fatigue des joints de soudure. Une dégradation appropriée (courant, température) et un soulagement mécanique de la contrainte minimisent ces risques. De plus, les événements ESD peuvent provoquer des courts-circuits d’enroulement inter-enroulement, donc les conceptions à forte exposition ESD doivent inclure des diodes de protection en amont.
Existe-t-il une alternative compatible avec les broches si la pièce que j’ai choisie devient obsolète ?
La compatibilité des broches dépend de la standardisation des boîtiers. De nombreux fabricants suivent des empreintes standard de l’industrie pour les emballages courants (0805, 1206, etc.), permettant un remplacement direct. Cependant, les paramètres électriques varient considérablement même entre les pièces physiquement compatibles. Lorsqu’un composant approche de la fin de vie, croisez immédiatement les courbes d’impédance, les courants et les performances thermiques avec des alternatives. Effectuez des tests de régression EMC avec la pièce de rechange avant de vous engager dans une utilisation en production, car des différences subtiles peuvent affecter les marges.
8. Conclusion et prochaines étapes
Choisir le bon choke en mode commun nécessite d’équilibrer les exigences de suppression des EMI, les contraintes d’intégrité du signal, la capacité de gestion du courant et les considérations liées à la chaîne d’approvisionnement. Les facteurs les plus critiques sont d’assurer une impédance en mode commun adéquate sur toute la plage de fréquences problématiques, d’éviter la saturation dans les pires conditions de courant, et de maintenir une performance différentielle acceptable en mode différentiel pour les interfaces de signal.
Si votre application implique une transmission de données à haute vitesse (USB 3.0+, Gigabit Ethernet, HDMI), privilégiez une faible perte d’insertion en mode différentiel et une capacité parasite minimale. Pour le filtrage par ligne électrique, privilégiez des courants élevés et une large couverture de fréquences de 150 kHz à 30 MHz. Les conceptions automobiles et industrielles nécessitent une qualification thermique étendue et une protection ESD robuste.
Avant de finaliser votre sélection de composant, vérifiez ce qui suit : la courbe d’impédance répond aux exigences à la température de fonctionnement, le courant nominal dépasse la charge maximale avec une marge suffisante, la perte d’insertion en mode différentiel est acceptable sur toute la bande passante du signal, l’empreinte est compatible avec la disposition et le processus d’assemblage de votre PCB, et au moins une seconde source qualifiée est disponible.
Pour des spécifications techniques détaillées et des notes d’application, téléchargez la fiche technique complète du fabricant. Si vous avez besoin d’aide pour les tests de conformité EMC ou la conception de filtres personnalisés, contactez un ingénieur applicatif de terrain qui pourra fournir des conceptions de référence et des modèles de simulation spécifiques à votre cas d’usage. De nombreux distributeurs proposent également des outils de sélection en ligne qui filtrent les composants en fonction de vos besoins électriques, simplifiant ainsi le processus initial de filtrage.