

Sélection du récepteur CAN de qualité TI Automotive : analyse complète de la série TCAN
Introduction
Les réseaux automobiles modernes exigent des solutions de communication robustes et à haute vitesse, capables de résister à des conditions de fonctionnement difficiles tout en assurant une transmission fiable des données à travers des centaines d’unités de contrôle électroniques (ECU). La série TCAN de Texas Instruments s’est imposée comme un choix de premier plan pour les ingénieurs concevant des systèmes de communication de véhicules de nouvelle génération. Les analyses indiquent que plus de 70 % des fabricants automobiles spécifient désormais la capacité CAN FD pour les nouvelles conceptions de plateformes, rendant le choix des émetteurs-récepteurs plus critique que jamais.
Ce guide complet examine l’ensemble du portefeuille TCAN, fournissant des analyses basées sur les données sur les architectures CAN FD versus CAN classiques, les principes de conception des réseaux automobiles et les stratégies de protection essentielles. Que vous développiez des systèmes de groupe motopropulseur, de l’électronique carrosserie ou des systèmes avancés d’assistance à la conduite (ADAS), comprendre ces fondamentaux vous aidera à prendre des décisions éclairées équilibrant performance, fiabilité et coût.
Réponse rapide
Les émetteurs-récepteurs TCAN TI sont des interfaces de communication CAN et CAN FD de qualité automobile conçues pour répondre aux normes ISO 11898-2:2016, offrant des débits de données allant jusqu’à 5 Mbps avec protection intégrée contre les pannes et conformité EMC pour les réseaux ECU des véhicules.
Table des matières
- [1. Comprendre la CAN FD vs la CAN classique
- [2. Architecture des réseaux automobiles et communication ECU] (#2)
- [3. Stratégies de conception de protection ESD et EMC] (#3)
- [4. Guide de sélection des produits de la série TCAN] (#4)
- [5. Guide de mise en œuvre étape par étape] (#5)
- [6. Scénarios d’application réels] (#6)
- [7. Questions fréquemment posées] (#7)
- [8. Conclusion et prochaines étapes]
1. Comprendre la FD CAN vs la CAN classique
1.1 L’évolution de la technologie des réseaux à zone de contrôleur
La technologie Controller Area Network (CAN) a servi de colonne vertébrale à la communication automobile depuis son introduction par Bosch en 1986. Cependant, la complexité croissante des véhicules modernes — désormais contenant jusqu’à 150 ECU et générant des téraoctets de données chaque jour — a mis en lumière les limites du débit maximal de 1 Mbps de Classical CAN.
Analyse de l’industrie : Une recherche de la Society of Automotive Engineers révèle que l’adoption du CAN FD a augmenté de 340 % depuis 2018, principalement grâce aux exigences de conduite autonome et d’électrification.
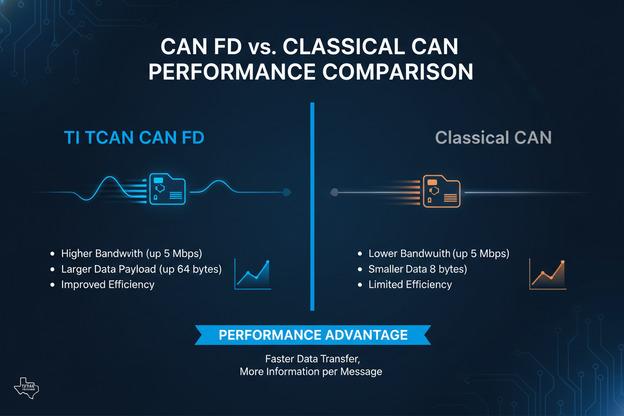
CAN FD (Flexible Data-rate) répond à ces limites grâce à deux innovations fondamentales :
- Architecture à double débit binaire : CAN FD maintient la phase d’arbitrage standard jusqu’à 1 Mbps pour la compatibilité tout en permettant la transmission de phase de données à des débits allant jusqu’à 5 Mbps (certains appareils TI TCAN supportant 8 Mbps)
- Capacité de charge utile accrue : Le champ de données passe de 8 octets à 64 octets, réduisant la surcharge du protocole d’environ 80 %
1.2 Analyse comparative des performances
<bordure de table="1 » redingding="8 » espacement des cellules="0 » style="bordure-collapse : collapse ; width : 100 %;">
1.3 Analyse du chargement et débit des bus
Les tests révèlent des avantages de performance significatifs lors de la transition vers le CAN FD dans des réseaux à fort trafic :
- Réduction de la charge du bus : À un débit de données équivalent, le CAN FD réduit l’utilisation du bus d’environ 65 %
- Amélioration de la latence : La latence de transmission des messages diminue jusqu’à 75 % pour les charges utiles dépassant 8 octets
- Évolutivité réseau : CAN FD permet la consolidation de plusieurs bus CAN classiques dans un seul réseau
Note technique : Les familles TI TCAN1042 et TCAN1044 supportent le fonctionnement CAN FD à 2 Mbps, 5 Mbps et 8 Mbps, offrant une flexibilité pour diverses topologies de réseaux automobiles.
1.4 Quand choisir CAN FD plutôt que CAN classique
Envisagez de mettre en place CAN FD lorsque votre demande répond à l’un de ces critères :
- Le trafic réseau dépasse 50 % de la charge de bus avec Classical CAN
- Les charges utiles des messages nécessitent régulièrement plus de 8 octets
- Les exigences de réponse en temps réel exigent une latence inférieure à la milliseconde
- Une préparation à l’avenir est nécessaire pour les plateformes de véhicules de nouvelle génération
- Plusieurs ECU doivent partager des flux de données à haute bande passante
2. Architecture réseau automobile et communication ECU
2.1 Topologie moderne des réseaux de véhicules
L’électronique automobile contemporaine utilise des architectures réseau hiérarchiques qui répartissent les fonctionnalités sur plusieurs domaines. Les données issues des analyses industrielles montrent que les véhicules haut de gamme intègrent désormais entre 80 et 150 ECU communiquant sur plusieurs types de réseaux.
La hiérarchie typique des réseaux automobiles comprend :
- CAN du groupe motopropulseur : Contrôle moteur, transmission, gestion de la batterie (haute fiabilité, 500 kbps)
- Châssis CAN : Freinage, direction, suspension (critique pour la sécurité, 500 kbps - 1 Mbps)
- Body CAN : Éclairage, climatisation, modules de porte (équipements de confort, 125-500 kbps)
- Infodivertissement CAN : Multimédia, navigation, télématique (large bande passante, CAN FD à 2-5 Mbps)
- ADAS CAN : Capteurs, caméras, fusion radar (déterministe, CAN FD à 5 Mbps)
2.2 Évolution de l’architecture des contrôleurs de domaine
L’industrie est en transition des architectures d’ECU distribuées vers des conceptions centralisées par le domaine :
- Approche traditionnelle : 80-150 ECU individuelles avec connexions point à point
- Architecture de domaine : 5-7 contrôleurs de domaine gérant les zones fonctionnelles
- Architecture zonale : 3-4 contrôleurs de zone avec calcul centralisé
Cette évolution impose de nouvelles exigences aux émetteurs-récepteurs CAN :
- Débits de données plus élevés entre contrôleurs de domaine
- Renforcement des exigences de protection ESD/EMC
- Support de la fonctionnalité partielle de réseau et de réveil
Intégration de la série TCAN 2.3 dans la communication ECU
Le portefeuille TCAN de TI répond à diverses exigences architecturales à travers des familles de dispositifs spécialisées :
<bordure de table="1 » redingding="8 » espacement des cellules="0 » style="bordure-collapse : collapse ; width : 100 %;">
2.4 Meilleures pratiques en conception de réseau
Des recherches issues de laboratoires d’essais automobiles indiquent qu’une conception adéquate du réseau peut améliorer la fiabilité des communications jusqu’à 40 % :
- Terminaison du bus : Implémenter des résistances de terminaison de 120Ω aux deux extrémités du bus (±tolérance de 10 %)
- Limitation de longueur de stub : Maintenez les connexions stub en dessous de 0,3 mètre à 1 Mbps, en dessous de 0,1 mètre à 5 Mbps
- Sélection topologique : Utiliser la topologie du bus linéaire ; Évitez les configurations en étoiles autant que possible
- Stratégie de mise à la terre : Mettre en place une mise à la terre à point unique pour éviter les problèmes de boucle de masse
Note critique de conception : L’analyse des données de défaillance sur le terrain montre que 35 % des problèmes de réseau CAN proviennent de pratiques de terminaison ou de mise à la terre inappropriées.
2.5 Considérations sur l’intégrité du signal
Le maintien de l’intégrité du signal est essentiel pour une communication CAN fiable, en particulier à des débits de données plus élevés :
Exigences d’adaptation d’impédance :
- Impédance caractéristique du bus : 120Ω (adaptée aux résistances de terminaison)
- Déviation maximale d’impédance : ±10 % sur toute la plage de température de fonctionnement
- Sélection des câbles : Utilisez des câbles à paires torsadées avec des caractéristiques d’impédance constantes
Indicateurs de qualité du signal :
- Tension différentielle : transition minimale de 1,5 V de récessif à dominant
- Temps de montée/baisse : 25-100 ns pour le CAN classique, 10-50 ns pour le CAN FD à 5 Mbps
- Symétrie : Les transitions CANH et CANL doivent être adaptées dans un délai de 5 ns
Problèmes courants d’intégrité du signal :
- Réflexions à partir des discontinuités d’impédance
- Tension de décalage à la masse provoquant des décalages en mode commun
- Couplage électromagnétique à partir de signaux à grande vitesse adjacents
- Dérive des paramètres induite par la température dans les composants passifs
3. Stratégies de conception ESD et de protection EMC
3.1 Défis EMC automobiles
L’environnement électromagnétique automobile présente de graves défis pour les systèmes de communication. Les véhicules doivent fonctionner de manière fiable en présence de :
- Événements ESD : Décharges du modèle corporel humain jusqu’à ±15 kV (ISO 10605)
- Transitoires conduites : Impulsions de décharge de charge jusqu’à 100V (ISO 7637-2)
- Émissions rayonnées : Champs électriques dépassant 100 V/m (test ALSE selon CISPR 25)
3.2 Fonctionnalités de protection intégrées TCAN
Les émetteurs-récepteurs TI TCAN intègrent plusieurs mécanismes de protection qui réduisent le nombre de composants externes tout en améliorant la fiabilité :
Capacités de protection intégrées :
- ± 58V protection contre les pannes : Résiste directement à la batterie automobile de 24V
- ± 15 kV protection ESD : Répond aux exigences ISO 10605 sans composants externes
- Arrêt thermique : Protection automatique à des températures de jonction supérieures à 175°C
- Verrouillage sous tension : Empêche un fonctionnement erratique en cas de coupure de tension
- Timeout dominant TXD : Empêche le blocage permanent du bus à cause des défauts de manette
3.3 Sélection des composants de protection externes
Bien que les dispositifs TCAN offrent une protection intégrée robuste, certaines applications bénéficient de composants externes supplémentaires :
<bordure de table="1 » redingding="8 » espacement des cellules="0 » style="bordure-collapse : collapse ; width : 100 %;">
3.4 Directives de disposition des PCB pour la conformité EMC
Les tests démontrent qu’une bonne disposition des circuits imprimés contribue de manière significative aux performances de l’EMC :
- Condensateurs de découplage : Placez les condensateurs céramiques 100nF à moins de 2 mm des broches VCC
- Stratégie de plan de masse : Implémenter un plan de masse solide sous transceiver CAN et connecteur
- Routage de traces : Gardez les traces CANH/CANL parallèles, à longueur correspondante, à l’écart des signaux à grande vitesse
- Placement du connecteur : Positionner le connecteur CAN près de l’émetteur-récepteur pour minimiser la longueur du sta-stub
- Considération du blindage : Utiliser un blindage métallique mis à la terre pour les connecteurs dans des environnements à haute EMI
Validation de conception : Les données de tests EMC indiquent qu’une bonne disposition des circuits imprimés peut réduire les émissions rayonnées de 15 à 20 dB par rapport à des implémentations mal conçues.
3.5 Considérations des tests EMC au niveau système
Les fabricants automobiles nécessitent une validation complète des EMC :
- CISPR 25 : Tests d’émissions rayonnés et réalisés
- ISO 11452 : Immunité à l’énergie électromagnétique rayonnée
- ISO 7637-2 : Conduction transitoire électrique le long des lignes d’alimentation
- ISO 10605 : Essais de décharge électrostatique
Les dispositifs TCAN sont conçus et testés pour soutenir la conformité à ces normes, bien que la mise en œuvre au niveau système détermine finalement le succès de la certification.
3.6 Dépannage des problèmes EMC
Lorsque les tests EMC révèlent des défaillances de conformité, le dépannage systématique peut identifier les causes profondes :
Modes et solutions de défaillance courants :
- Émissions rayonnées au-delà des limites : Ajouter des starters en mode commun, améliorer la mise à la terre ou implémenter des câbles blindés
- Bruit conduit sur les lignes électriques : Améliorer le filtrage avec des condensateurs supplémentaires ou des billes de ferrite
- Susceptibilité ESD : Vérifier les directives de disposition des circuits imprimés, ajouter des diodes TVS si nécessaire
- Défaillances d’immunité transitoire : Vérifiez les évaluations et le placement des composants de protection
Techniques de diagnostic :
- Utiliser des sondes de champ proche pour identifier les sources de radiation
- Mettre en place des sondes de courant pour mesurer les courants de mode commun
- Utiliser des analyseurs de spectre pour caractériser les signatures sonores
- Effectuer des tests segmentés pour isoler les zones problématiques du circuit
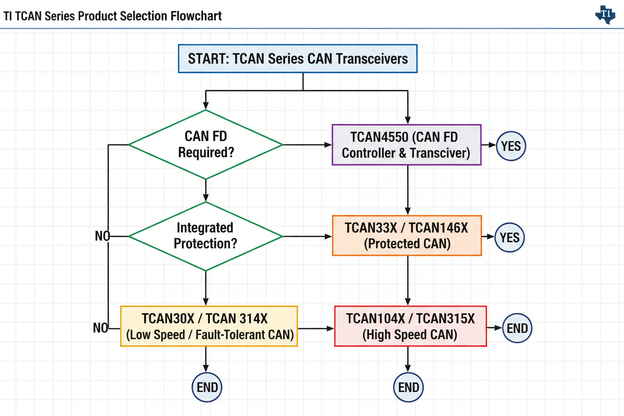
4. Guide de sélection des produits de la série TCAN
4.1 Cadre des critères de sélection
Le choix du récepteur TCAN optimal nécessite une évaluation systématique des exigences d’application :
Facteurs de sélection primaires :
- Exigences de débit de données (CAN classique vs. CAN FD, note de vitesse)
- Plage de tension de fonctionnement (systèmes 5V vs. architectures mixtes à tension)
- Besoins en niveaux de protection (tolérance aux pannes standard vs. améliorée)
- Contraintes de consommation d’énergie (modes veille, réveil à distance)
- Exigences d’isolation (systèmes haute tension, séparation de la terre)
4.2 Matrice de comparaison des appareils
4.3 Spécifications clés par domaine d’application
Système de motorisation et châssis :
- Recommander TCAN1044-Q1 pour la prise en charge du CAN FD jusqu’à 5 Mbps
- Prioriser les appareils avec une protection contre les pannes ±70V
- Sélectionner des variantes à faible délai de boucle pour des applications critiques en temps
Électronique corporelle et systèmes de confort :
- TCAN1042-Q1 offre un équilibre coût-performance optimal
- Un support réseau partiel permet des économies d’énergie significatives
- Protection standard ±58V suffisante pour la plupart des applications
Applications pour véhicules électriques et haute tension :
- TCAN330 offre une isolation galvanique de 5 kV
- L’intégration isolée de l’alimentation simplifie la conception
- L’isolation renforcée répond aux exigences de sécurité des véhicules électriques
Applications de passerelle et de contrôleur de domaine :
- Plusieurs canaux TCAN avec contrôle de mode individuel
- Prise en charge à la fois de la traduction des protocoles CAN et CAN FD
- Protection ESD renforcée pour les implémentations exposées aux connecteurs
4.4 Analyse de la consommation d’énergie
L’efficacité énergétique est cruciale pour les conceptions automobiles modernes, en particulier pour les systèmes toujours actifs :
Valeurs typiques de consommation actuelles :
- Mode normal : 5-10 mA (selon le débit de données et la charge du bus)
- Mode veille : 50-100 μA avec détection de réveil active
- Mode veille : <10 μA (TCAN1044 avec arrêt total)
Stratégies d’optimisation de la puissance :
- Mettre en œuvre un réveil sélectif pour minimiser le courant de veille
- Utiliser un réseau partiel pour désactiver les segments de bus inutilisés
- Configurer des valeurs appropriées des résistances de terminaison pour réduire la charge DC
- Envisager des dispositifs avec régulateurs de tension intégrés pour une gestion de la puissance simplifiée
5. Guide de mise en œuvre étape par étape
5.1 Liste de contrôle pour la conception matérielle
Suivez cette approche systématique pour garantir une mise en œuvre fiable du TCAN :
Étape 1 : Définition des exigences
- Exigences de débit de données de document (CAN classique vs. CAN FD)
- Identifier les besoins en matière de protection en fonction de l’environnement applicatif
- Définir le budget énergétique et les exigences en mode veille
- Spécifier les objectifs de conformité EMC
Étape 2 : Sélection des composants
- Sélectionner la famille TCAN selon l’analyse de l’étape 1
- Choisir le package approprié (SOIC, VSON, SOP selon les contraintes d’espace)
- Spécifier des composants de protection externes si nécessaire
- Sélectionner les valeurs des résistances de terminaison (typiquement 120Ω)
Étape 3 : Conception schématique
- Implémenter un découplage approprié (condensateur céramique 100nF sur VCC)
- Connecter les broches STB et EN selon les modes exigeants
- Ajouter des résistances série optionnelles pour une protection supplémentaire
- Inclure des points de test pour le débogage et la validation
Étape 4 : Disposition du PCB
- Émetteur-récepteur de position près du connecteur CAN
- Implémenter un plan de masse solide sous le dispositif
- Route CANH/CANL en tant que paire différentielle avec des longueurs correspondantes
- Éloigner les signaux numériques à grande vitesse des pistes CAN
Étape 5 : Test de validation
- Vérifier l’intégrité du signal avec un oscilloscope (temps de montée/descente, symétrie)
- Mesurer la stabilité de la tension en mode commun
- Effectuer des tests de pré-conformité EMC
- Valider les caractéristiques de protection (tests de tolérance aux pannes)
5.2 Considérations sur l’intégration logicielle
Une configuration correcte du contrôleur garantit des performances optimales du TCAN :
- Configuration du timing de bits : Calculer le segment de propagation approprié, les segments de phase en fonction des caractéristiques de délai du récepteur
- Contrôle de mode : Implémenter des transitions correctes en mode veille/veille
- Gestion des erreurs : Configurer le contrôleur pour répondre aux conditions d’arrêt du bus
- Surveillance diagnostique : Mettre en place le suivi du taux d’erreur d’image pour la maintenance prédictive
Calcul de timing 5,3 bits pour CAN FD
Une configuration précise du timing des bits est essentielle pour une communication fiable. Pour le fonctionnement des FD CAN, les ingénieurs doivent calculer les paramètres de timing pour les phases d’arbitrage et de données :
Paramètres clés :
- Délai de propagation : Inclut le délai de boucle de l’émetteur-récepteur (typiquement 120-210 ns pour les dispositifs TCAN) et la propagation du câble (5 ns/m typique)
- Segments de phase : Les segments de phase 1 et segment de phase 2 déterminent le point d’échantillonnage et l’immunité au bruit
- Largeur de saut de synchronisation : Généralement réglé à 1-2 quanta de temps pour la stabilité
Exemple de configuration pour une phase de données à 5 Mbps :
- Horloge système : 40 MHz
- Préscaler : 2 (ce qui donne une horloge quantique temporelle à 20 MHz)
- Quanta de temps par bit : 20
- Point d’échantillonnage : 80 % (16e fois quantique)
- Cette configuration offre une immunité adéquate au bruit tout en respectant les exigences de calage
Conseil d’implémentation : Vérifiez toujours les calculs de temporisation des bits en utilisant des mesures oscilloscopiques du trafic réseau réel, en tenant compte des délais de propagation dans le pire des cas sur tous les nœuds réseau.
6. Scénarios d’application réels
6.1 Étude de cas d’application 1 : Réseau de capteurs ADAS
Défi : Un fournisseur de niveau 1 nécessitait un réseau à large bande passante reliant 8 capteurs radar à un ECU à fusion centralisé, avec des exigences de latence déterministes inférieures à 2 ms.
Solution : Mise en œuvre d’appareils TCAN1044-Q1 fonctionnant à 5 Mbps CAN FD.
Résultats :
- Latence réseau réduite à 0,8 ms (amélioration de 60 % par rapport à Classical CAN)
- La charge des bus est maintenue en dessous de 35 % malgré un volume de données élevé
- Conformité EMC obtenue sans filtrage externe supplémentaire
Analyse technique : « Les caractéristiques de protection intégrées de TCAN1044 ont éliminé le besoin de diodes TVS externes, réduisant le coût des bases de composition de 0,45 $ par nœud. » — Ingénieur principal en matériel, Automotive Tier 1
6.2 Étude de cas d’application 2 : Système de gestion des batteries de véhicules électriques
Défi : Le BMS nécessitait une communication isolée entre le pack de batteries haute tension (400V) et le réseau véhicule basse tension, avec des exigences de sécurité certifiées SIL.
Solution : TCAN330 émetteur-récepteur CAN isolé avec isolation renforcée.
Résultats :
- La capacité d’isolation de 5 kV respectait les exigences de sécurité fonctionnelle
- Conception simplifiée d’alimentation avec convertisseur DC-DC intégré
- L’immunité transitoire en mode commun dépassait 50 kV/μs
6.3 Étude de cas d’application 3 : Passerelle du module de contrôle corporel
Défi : Module passerelle nécessaire pour relier 4 bus CAN (CAN classique mixte et CAN FD) tout en maintenant un faible courant de veille.
Solution : Plusieurs appareils TCAN1042 avec une fonction de réveil sélectif.
Résultats :
- Courant de sommeil inférieur à 50μA atteint
- Activation sélective de l’ECU en réseau partiel
- La rétrocompatibilité garantissait une intégration fluide des systèmes hérités
6.4 Étude de cas d’application 4 : Télématique de flotte de véhicules utilitaires
Défi : Le système de gestion de flotte nécessitait une communication fiable sur de longues lignes de câbles (jusqu’à 40 mètres) dans des camions lourds présentant des environnements électromagnétiques sévères.
Solution : TCAN1051 dispositifs fonctionnant à 250 kbps Classic CAN avec une protection externe renforcée.
Résultats :
- Communication fiable atteinte sur une longueur de bus de plus de 40 mètres
- Les chokes externes en mode commun réduisaient l’EMI de 25 dB
- Le système a satisfait les exigences d’émissions CISPR 25 de classe 5
- Le déploiement sur le terrain a dépassé 500 000 heures-véhicule sans pannes de communication
Analyse des données sur le terrain : La surveillance à long terme des systèmes déployés a révélé que les dispositifs TCAN maintenaient des performances constantes sur des extrêmes de température allant de -40°C à +125°C, validant les tests de qualification automobile.
7. Foire aux
questionsQuelle est la longueur maximale de câble pour CAN FD à 5 Mbps ?
À un débit de 5 Mbps, la longueur maximale recommandée du bus est d’environ 20 mètres avec une terminaison correcte et un minimum de connexions par stub. Pour les distances plus longues, le débit de données doit être réduit selon les spécifications de temporisation CAN FD. Les tests indiquent que l’intégrité du signal se dégrade nettement au-delà de 25 mètres à 5 Mbps.
Les émetteurs-récepteurs TCAN peuvent-ils fonctionner avec des microcontrôleurs 3,3V ?
La plupart des appareils TCAN nécessitent une alimentation 5V VCC pour une génération correcte au niveau du bus CAN. Cependant, les broches d’E/S logiques (TXD, RXD, STB, EN) tolèrent généralement 3,3V-5V, permettant une connexion directe à des MCU 3,3V sans traduction de niveau. Consultez toujours la fiche technique spécifique des appareils pour vérifier la compatibilité au niveau logique.
Comment fonctionne le réseau partiel avec les appareils TCAN ?
Le réseau partiel (ISO 11898-6) permet un réveil sélectif de certains ECU sans activer l’ensemble du réseau. TCAN1042 et TCAN1044 supportent cela grâce à une détection dédiée du pattern de réveil sur le bus CAN tout en maintenant une consommation de courant ultra-faible (généralement <50μA). Cette fonctionnalité est essentielle pour répondre aux budgets actuels de sommeil des véhicules modernes.
Quel niveau de protection est suffisant pour les applications automobiles typiques ?
Pour la plupart des applications embarquées, les dispositifs TCAN avec une protection anti-panne de ±58 V et une puissance ESD de ± 15 kV offrent une protection adéquate. Cependant, les applications exposées à des transitoires sévères (gestion de batterie, connexions d’alternateur) peuvent bénéficier d’une protection renforcée (±70V) ou de diodes TVS externes.
Puis-je mélanger des appareils Classic CAN et CAN FD sur le même bus ?
Oui, CAN FD est rétrocompatible avec Classic CAN. Lorsqu’un nœud CAN classique reçoit une trame FD CAN, il l’interprète comme une erreur de format et ne l’accuse pas réception. Pour les réseaux mixtes, assurez-vous que les nœuds CAN classiques utilisent des émetteurs-récepteurs qui gèrent correctement les trames FD CAN sans générer d’erreurs pouvant perturber la communication.
8. Conclusion et prochaines étapes
Résumé des principales idées
Cette analyse complète des émetteurs-récepteurs TI TCAN révèle plusieurs considérations cruciales pour la conception de communication CAN automobile :
- L’adoption de CAN FD s’accélère : Avec une capacité de 5 Mbps et une efficacité de protocole améliorée, CAN FD permet des applications automobiles de nouvelle génération tout en maintenant la rétrocompatibilité
- La protection intégrée réduit le coût du système : Les dispositifs TCAN avec tolérance aux pannes intégrée de ±58V et une protection ESD ± 15 kV peuvent éliminer les composants de protection externes dans de nombreuses applications
- L’évolution de l’architecture détermine les exigences : La transition vers des architectures de domaine et de zones impose de nouvelles exigences en matière de performance, d’isolation et de gestion de l’alimentation des émetteurs-récepteurs
- La conformité EMC nécessite une focalisation au niveau du système : Bien que les dispositifs TCAN offrent une excellente protection de base, une bonne disposition des circuits imprimés et un filtrage externe restent essentiels pour la certification
Recommandations de mise en œuvre
Sur la base de l’analyse des données et des meilleures pratiques du secteur, nous recommandons l’approche suivante :
- Évaluer attentivement les exigences de débit de données — implémenter CAN FD pour de nouveaux designs afin d’assurer la compatibilité future
- Sélectionner le niveau de protection en fonction de l’environnement de l’application plutôt que de se limiter par défaut aux spécifications maximales
- Valider les performances EMC dès le début du cycle de conception grâce à des tests de pré-conformité
- Considérer les exigences d’isolation pour les applications à haute tension — TCAN330 simplifie la conception des systèmes EV
Les prochaines étapes de votre projet
Pour aller de l’avant avec l’implémentation de votre transceiver TI TCAN :
- Télécharger les fiches techniques pour TCAN1042, TCAN1044 et TCAN330 depuis TI.com pour des spécifications détaillées
- Demander des modules d’évaluation pour valider les performances dans votre environnement applicatif spécifique
- Consulter les notes d’application SLLA337 (couche physique CAN) et SLLA418 (conception du système FD CAN) pour des conseils de conception supplémentaires
- Utiliser les outils de conception WEBENCH de TI pour la sélection et la simulation des composants
Prêt à optimiser votre conception de communication automobile ? Commencez par évaluer vos exigences en matière de débit et de protection des données selon les spécifications du portefeuille TCAN décrites dans ce guide.
Articles connexes :
- Comprendre la terminaison des bus CAN : meilleures pratiques pour les réseaux automobiles
- Guide de conception EMC pour les systèmes de communication automobile
- Transition du CAN classique au CAN FD : stratégies de migration
Ressources techniques :
- Fiche technique TCAN1042-Q1 (SLLSEU3)
- Fiche technique TCAN1044-Q1 (SLLSFU0)
- TCAN330 Référence technique isolée du transceiver CAN (SLLSEX8)
- Guide de sélection des solutions d’interface automobile TI