

Alimentation à commutation (SMPS) : Guide complet de sélection et de conception pour les ingénieurs
Les alimentations à commutation sont devenues la colonne vertébrale des systèmes électroniques modernes, des appareils grand public à l’automatisation industrielle. Pour les ingénieurs de conception et les équipes achats évaluant des solutions d’alimentation, comprendre la technologie SMPS — et savoir comment choisir la bonne topologie pour votre application — a un impact direct sur l’efficacité, la fiabilité et le coût.
Ce guide explique les paramètres techniques clés qui comptent, présente la méthodologie de sélection basée sur les contraintes réelles de conception, et met en lumière les écueils courants qui peuvent perturber votre performance sur la scène de puissance. Que vous conceviez de l’électronique automobile, des nœuds de capteurs IoT ou des systèmes de contrôle industriels, vous trouverez des informations exploitables pour prendre de meilleures décisions d’alimentation électrique.
Table des matières
- [Qu’est-ce qu’une alimentation à commutation et pourquoi elle est importante] (#1-qu’est-est-un-alimentation-en mode interrupteur et pourquoi c’est important)
- Paramètres techniques clés expliqués
- [Comment choisir la bonne topologie SMPS pour votre application](#3-comment-choisir-la-topologie-SMPS adaptée-pour-vostra-application)
- [Comparaison de performance : Buck, Boost, Buck-Boost et topologies isolées] (#4-comparaison-performance-buck-boost-buck-boost-et-topologies-isolées)
- [Considérations de conception et pièges courants] (#5-considérations-et-pièges-courants)
- [Considérations sur la chaîne d’approvisionnement et l’approvisionnement] (#6-Considérations de la chaîne d’approvisionnement et des approvisionnements)
- FAQ
- [Conclusion et prochaines étapes recommandées] (#8-conclusion-et-suites-recommandées)
1. Qu’est-ce qu’une alimentation à commutation et pourquoi c’est important
Une alimentation à découpage convertit efficacement l’alimentation électrique en allumant et éteignant un transistor de puissance à haute fréquence, généralement entre 20 kHz et plusieurs MHz. Contrairement aux régulateurs linéaires qui dissipent l’excès de tension sous forme de chaleur, les topologies SMPS transfèrent de l’énergie via des inductances et des condensateurs, atteignant des rendements supérieurs à 85 % et souvent supérieurs à 95 % dans les conceptions optimisées.
Pour les ingénieurs, cette efficacité se traduit par une réduction des besoins en gestion thermique, des formats plus petits et des coûts d’exploitation plus faibles. Dans les applications alimentées par batterie, l’efficacité des SMPS prolonge directement le temps d’exécution. Dans les systèmes industriels consommant de l’énergie continue, les améliorations d’efficacité réduisent la dissipation de chaleur et améliorent la fiabilité à long terme.
Le compromis est la complexité. Les conceptions SMPS nécessitent une sélection minutieuse des composants, une discipline de disposition des circuits imprimés et une attention particulière aux interférences électromagnétiques (EMI). Des erreurs de conception — telles qu’une compensation insuffisante de la boucle ou un mauvais placement des inductances — peuvent entraîner une instabilité, une ondulation excessive ou des émissions conduites/rayonnées qui ne passent pas les tests réglementaires.
2. Paramètres techniques clés expliqués
Lors de l’évaluation de contrôleurs SMPS ou de modules intégrés, concentrez-vous sur des paramètres qui influencent directement les performances, la fiabilité et la conformité de votre conception. La fiche technique contient des dizaines de spécifications, mais ce sont généralement celles qui guident les décisions de sélection.
Efficacité et Perte de Puissance
L’efficacité est le rapport entre la puissance de sortie et la puissance d’entrée, exprimé en pourcentage. Les convertisseurs abaisseurs synchrones modernes atteignent une efficacité de 92 à 96 % à moyenne charge, tandis que les convertisseurs flyback dans des applications isolées atteignent généralement 80 à 88 %. Les pertes de commutation, de conduction et de transmission de grille contribuent toutes à la dissipation totale de puissance.
Faites attention aux courbes d’efficacité sur toute la plage de charge. De nombreux contrôleurs SMPS maintiennent une grande efficacité à de lourdes charges mais chutent significativement à faible charge, sauf s’ils mettent en place un mode saut d’impulsions ou en rafale. Pour les applications de batteries à profils de charge variables, l’efficacité en charge légère compte autant que l’efficacité maximale.
Fréquence de commutation
La fréquence de commutation influence la taille de l’inductance, le choix du condensateur et les caractéristiques EMI. Les fréquences plus élevées (au-dessus de 1 MHz) permettent d’obtenir des composants passifs plus petits, réduisant la taille de la solution. Cependant, les pertes de commutation augmentent avec la fréquence, et l’atténuation des EMI devient plus complexe.
Dans les applications automobiles et industrielles nécessitant la conformité aux émissions conduites (CISPR 25, CISPR 32), la sélection de fréquence est un compromis de conception crucial. Fonctionner en dessous des bandes radio AM (530-1710 kHz) ou au-dessus de 2 MHz peut simplifier le filtrage, mais la disponibilité des composants et les contraintes de coût poussent souvent les conceptions dans la plage 300-600 kHz.
Plage de tension d’entrée et de sortie
Les contrôleurs SMPS spécifient des tensions d’entrée minimales et maximales, et certaines topologies imposent des limites strictes sur les rapports de tension entrée/sortie. Les convertisseurs buck nécessitent Vin > Vout, les convertisseurs boost nécessitent Vout > Vin, et les topologies buck-boost ou SEPIC gèrent des plages entrée-sortie qui se chevauchent au prix de composants supplémentaires et d’une efficacité légèrement inférieure.
Dans les applications automobiles, la plage de tension d’entrée doit accueillir le vilebrequin à froid (aussi bas que 3,5 V), le fonctionnement normal (9-16 V) et les transitoires de décharge de charge (jusqu’à 40 V). Les systèmes industriels sur rails 24V doivent tolérer une variation de ±20 %. Vérifiez toujours que la plage de fonctionnement du contrôleur couvre vos transitoires les pires cas, pas seulement la tension nominale.
Régulation de la charge et régulation de la ligne
La régulation de charge précise à quel point la tension de sortie change lorsque le courant de charge varie du minimum au maximum. La régulation de la ligne spécifie la variation de la tension de sortie au fur et à mesure que la tension d’entrée change. Les applications haute performance nécessitent une réglementation stricte, généralement inférieure à 1 % pour les deux indicateurs.
Ces paramètres sont influencés par la conception de la boucle de rétroaction, la précision de référence et l’impédance de sortie. Si votre application a des exigences strictes de tolérance à la tension — comme l’alimentation de ADC de précision ou de front-ends RF — vérifiez que les performances réglementaires du contrôleur SMPS répondent à vos besoins sans nécessiter une régulation supplémentaire après la transmission.
Réponse transitoire
La réponse transitoire décrit la rapidité avec laquelle le SMPS se remet après des changements soudains de charge. Critique dans les applications à charges pulsées — comme les émetteurs-récepteurs sans fil qui alternent entre modes veille et transmission, ou processeurs qui bloquent l’exécution par porte d’horloge. Une mauvaise réponse transitoire provoque une baisse ou un dépassement de tension qui peut déclencher des réinitialisations de coupure de tension ou endommager des circuits sensibles.
La conception d’un réseau de compensation affecte directement la réponse transitoire. Les contrôleurs avec contrôle adaptatif en mode allumage ou en tension peuvent nécessiter des stratégies de compensation différentes de ceux des contrôleurs en mode courant. Lors de la sélection d’un SMPS, examinez les composantes de compensation recommandées de la fiche technique et vérifiez la performance transitoire dans les conditions de votre étape de charge attendue.
| Paramètre | Plage typique | Impact sur le design |
|---|---|---|
| Efficacité (pleine charge) | 85-96 % | Gestion thermique, autonomie de la batterie |
| Fréquence de commutation | 200 kHz - 2 MHz | Taille des composants, complexité de filtrage EMI |
| Plage de tension d’entrée | Application spécifique | Sélection topologique, protection des transitoires |
| Précision de la tension de sortie | ±1 % à ±5 % | Exigences post-réglementation, charges sensibles |
| Réponse transitoire de charge | 10-100 μs | Capacité en masse, réseau de compensation |
| Courant en repos | 10 μA - 5 mA | Durée de vie de la batterie en veille, efficacité en charge légère |
| Température de fonctionnement | -40°C à +125°C | Qualification automobile/industrielle |
Ce tableau résume les paramètres les plus fréquemment utilisés dans les décisions de sélection SMPS. Priorisez les paramètres en fonction des contraintes de votre application — autonomie pour les appareils portables, performance thermique pour les systèmes à haute densité, réponse transitoire pour les applications RF.
3. Comment choisir la topologie SMPS adaptée à votre application
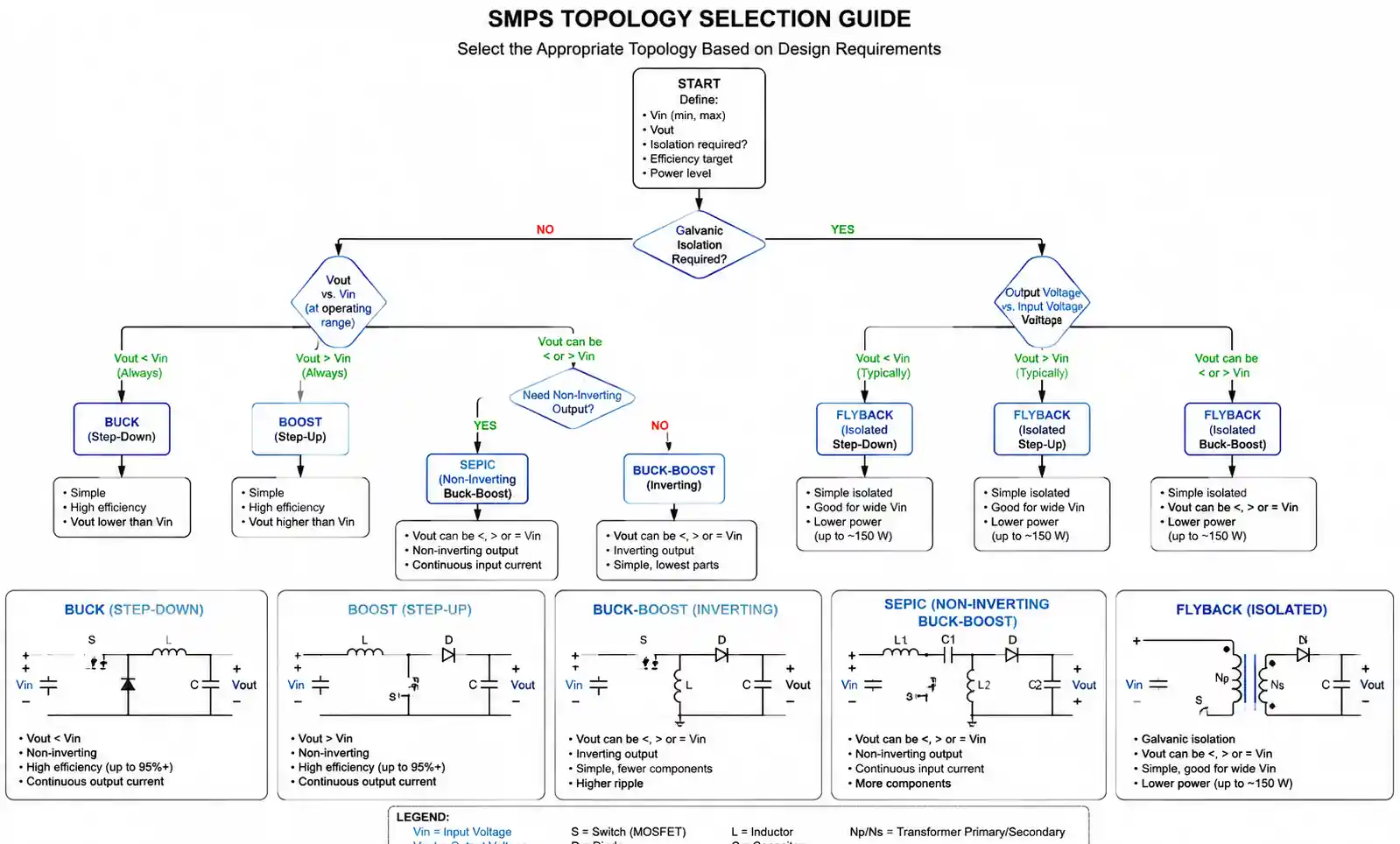
La sélection d’une topologie SMPS commence par votre plage de tension d’entrée, la tension de sortie requise, le courant de charge et les exigences d’isolation. Aucune topologie unique n’optimise chaque application, donc le processus de sélection implique des compromis entre efficacité, coût, nombre de composants et complexité de conception.
Étape 1 : Définir la relation tension entrée-sortie
Si votre tension de sortie est toujours inférieure à la tension minimale d’entrée, un convertisseur buck (abaissement) est le choix naturel. Si la sortie doit être supérieure à l’entrée, utilisez un convertisseur boost (boost-up). Lorsque les tensions d’entrée et de sortie se chevauchent, ou lorsque l’entrée peut être plus élevée ou plus basse que la sortie, il faut considérer les topologies buck-boost, SEPIC ou Cuk.
Pour les applications nécessitant une isolation galvanique — telles que les convertisseurs AC-DC, les dispositifs médicaux ou les systèmes présentant des problèmes de boucle de masse — des topologies isolées comme les convertisseurs à résonance en retour, en avant ou LLC sont nécessaires. L’isolation ajoute complexité et coût, donc ne la spécifiez que lorsque les normes de sécurité ou l’architecture système l’exigent.
Étape 2 : Évaluer les exigences d’efficacité
Si votre application exige une efficacité maximale supérieure à 90 %, une rectification synchrone est généralement nécessaire. Les convertisseurs buck synchrones remplacent la diode à rotation libre par un MOSFET à faible RDS(on), réduisant ainsi les pertes de conduction. C’est la norme dans les appareils alimentés par batterie, les alimentations de centres de données et toute application où les contraintes thermiques limitent la dissipation de puissance.
Pour les conceptions sensibles au coût où l’efficacité est acceptable entre 80 et 85 %, les topologies asynchrones (à base de diodes) réduisent le nombre de composants et simplifient la disposition des circuits imprimés. Cela est courant dans les alimentations auxiliaires, les rails de polarisation et les systèmes industriels à faible consommation.
Étape 3 : Considérez la taille du composant et la surface du circuit imprimé
La commutation de fréquence impacte directement la taille passive des composants. Fonctionner à 1-2 MHz permet des inductances de 1 à 2 μH dans des boîtiers compacts, tandis que les conceptions 200-400 kHz nécessitent des inductances de 4 à 10 μH. Une fréquence plus élevée réduit la taille des magnétiques mais augmente les pertes de commutation et les exigences de filtrage EMI.
Dans les conceptions à espace limité — portables, capteurs IoT, dispositifs médicaux portables — les modules d’alimentation intégrés combinant contrôleur, MOSFET et inductance dans un seul boîtier offrent la plus petite empreinte. Le compromis est une flexibilité réduite dans l’optimisation de l’efficacité ou de la réponse transitoire.
Étape 4 : Évaluer l’EMI et la sensibilité au bruit
Les convertisseurs à commutation produisent du bruit à haute fréquence qui peut s’accoupler à des circuits analogiques sensibles, des front-ends RF ou des systèmes de mesure de précision. Si votre conception inclut des ADC avec une résolution supérieure à 12 bits, des amplificateurs à faible bruit ou des émetteurs-récepteurs RF, le bruit conduit et rayonné du SMPS peut dégrader l’intégrité du signal.
Les stratégies d’atténuation incluent l’horloge à spectre étalé (dithering en fréquence pour réduire les émissions de pic), le fonctionnement synchrone (horlogage de plusieurs convertisseurs à partir d’une même source pour éviter les fréquences de battement), ainsi qu’une disposition soignée des circuits imprimés avec des plans de masse et un découplage approprié. Certaines applications nécessitent une post-régulation avec des régulateurs linéaires à faible chute pour isoler les étages analogiques sensibles du ridle SMPS.
| Type d’application | Topologie recommandée | Priorité de conception clé |
|---|---|---|
| Appareil IoT alimenté par batterie (entrée 3,7V, sortie 3,3V) | Buck synchrone | Efficacité en charge légère, courant quiescent |
| Rail automobile 12V vers 5V USB (manivelle froide vers charge) | Buck synchrone avec large Vin | Protection des transitoires, efficacité |
| Chargeur de batterie (entrée 5V, Li-ion 4,2V) | Buck ou linéaire (si thermique acceptable) | Précision de la charge, coût |
| Adaptateur AC-DC isolé (85-265 VAC à 12V DC) | Flyback | Isolation de sécurité, coût |
| Boost pour rétroéclairage LED (3,3V à 24V) | Boost synchrone | Haute tension de sortie, efficacité |
| Sortie industrielle 24V vers 12V/5V double | Buck synchrone + LDO ou buck + buck | Efficacité, régulation de la charge |
| Dispositif médical (isolé, faible fuite) | Flyback isolé ou en avant | Conformité de sécurité, courant de fuite |
Cette matrice de sélection présente les choix topologiques typiques pour des applications courantes. Utilisez-le comme point de départ, puis affinez en fonction des exigences de performance spécifiques, des objectifs de coûts et des contraintes réglementaires.
4. Comparaison des performances : Buck, Boost, Buck-Boost et topologies isolées
Chaque topologie SMPS présente des forces et des limites caractéristiques. Comprendre ces compromis vous aide à adapter la topologie aux exigences de l’application et à éviter la surdimensionnerie.
Convertisseur Buck (Abaissement)
Les convertisseurs buck réduisent la tension d’entrée à une tension de sortie plus basse avec des rendements typiques de 90 à 95 % dans les conceptions synchrones. Les avantages incluent un contrôle simple, un comportement prévisible et une compensation simple. Les inconvénients incluent l’exigence que Vin > Vout en permanence, ainsi que la sensibilité aux transitoires de tension d’entrée.
Idéal pour : dispositifs alimentés par batterie, régulation du point de charge, alimentation de la logique numérique depuis des rails à haute tension.
Convertisseur Boost (Step-Up)
Les convertisseurs boost augmentent la tension avec une efficacité similaire à celle des convertisseurs buck, mais le courant de sortie est inférieur au courant d’entrée. Les convertisseurs boost ont un zéro dans le demi-plan droit dans leur fonction de transfert, ce qui complique la compensation de boucle et limite la réponse transitoire. La topologie de suralimentation ne peut pas limiter le courant d’appel au démarrage sans composants supplémentaires.
Idéal pour : les pilotes LED, les systèmes de secours par batterie, générant des tensions de polarisation supérieures à l’alimentation d’entrée.
Convertisseurs Buck-Boost et SEPIC
Les topologies buck-boost, SEPIC et Cuk peuvent augmenter ou diminuer la tension, ce qui les rend idéales lorsque la plage de tension d’entrée croise la tension de sortie. Le compromis est une augmentation du nombre de composants (deux inductances dans SEPIC/Cuk, ou une contrainte de courant d’inductance plus élevée en buck-boost), un rendement légèrement inférieur et une conception magnétique plus complexe.
Idéal pour : applications automobiles avec une large variation d’entrée, conversion Li-ion de cellule unique à 5V, systèmes dont la tension de source d’entrée est incertaine.
Convertisseur Flyback (Isolé)
Le flyback est la topologie isolée la plus courante pour des niveaux de puissance faibles à moyens (inférieurs à 100W). Il offre une isolation galvanique avec un seul composant magnétique (inductance couplée/transformateur), mais l’efficacité est généralement de 80-88 %, et la ripple de sortie est supérieure à celle des convertisseurs non isolés. Les convertisseurs flyback nécessitent une conception soigneuse des transformateurs et des circuits de snubber pour gérer l’inductance de fuite.
Idéal pour : adaptateurs AC-DC, alimentations de polarisation isolées, dispositifs médicaux nécessitant une isolation de sécurité.
| Topologie | Efficacité (typique) | Nombre de composants | Complexité | Isolation | Meilleurs cas d’utilisation |
|---|---|---|---|---|---|
| Buck synchrone | 92-96 % | Low | Low | Non | Alimenté par batterie, point de charge |
| Buck asynchrone | 85-90 % | Très bas | Très bas | Non | Rails auxiliaires sensibles au coût |
| Boost synchrone | 90-95 % | Low | Moyen | Non | Pilotes LED, batterie de secours |
| Buck-Boost | 85-92 % | Moyen | Moyen | Non | Large plage de tension d’entrée |
| SEPIC | 85-90 % | Moyen | Moyen | Non | Vin croise Vout |
| Flyback (isolé) | 80-88 % | Moyen | Haut | Oui | AC-DC, biais isolé, médical |
| En avant (isolé) | 85-90 % | Haut | Haut | Oui | Puissance plus élevée, sorties multiples |
Ce tableau comparatif met en lumière les principaux compromis entre les topologies SMPS courantes. Choisissez en fonction de vos objectifs d’efficacité spécifiques, des contraintes de coût et des exigences d’isolation, plutôt que de supposer qu’une topologie est universellement supérieure.
5. Considérations de conception et pièges courants
Même avec la bonne topologie et le bon circuit intégré contrôleur, les conceptions SMPS échouent ou sous-performent à cause d’erreurs évitables dans le choix des composants, la disposition du PCB et la compensation des boucles. Ce sont les problèmes les plus fréquemment rencontrés lors de la validation de conception et de l’analyse des défaillances.
Erreurs de sélection d’inducteurs
Choisir une inductance uniquement en fonction de la valeur d’inductance et de la puissance nominale du courant est insuffisant. Le courant de saturation (Isat) doit dépasser le courant d’inductance de crête avec une marge, et la résistance DC (DCR) impacte directement l’efficacité. Dans les conceptions à fort courant, une différence de 10 mΩ en DCR peut coûter 1 à 2 % d’efficacité.
Le matériau du carottage est important pour le fonctionnement en haute fréquence. Les noyaux de ferrite fonctionnent bien au-dessus de 500 kHz, tandis que les noyaux en poudre de fer sont meilleurs pour les basses fréquences mais présentent des pertes plus élevées. Les inductances blindées réduisent les EMI rayonnées mais coûtent plus cher et peuvent avoir un courant de saturation plus faible que les types non blindés. Vérifiez toujours la performance de l’inductance à la fréquence et à la température de fonctionnement.
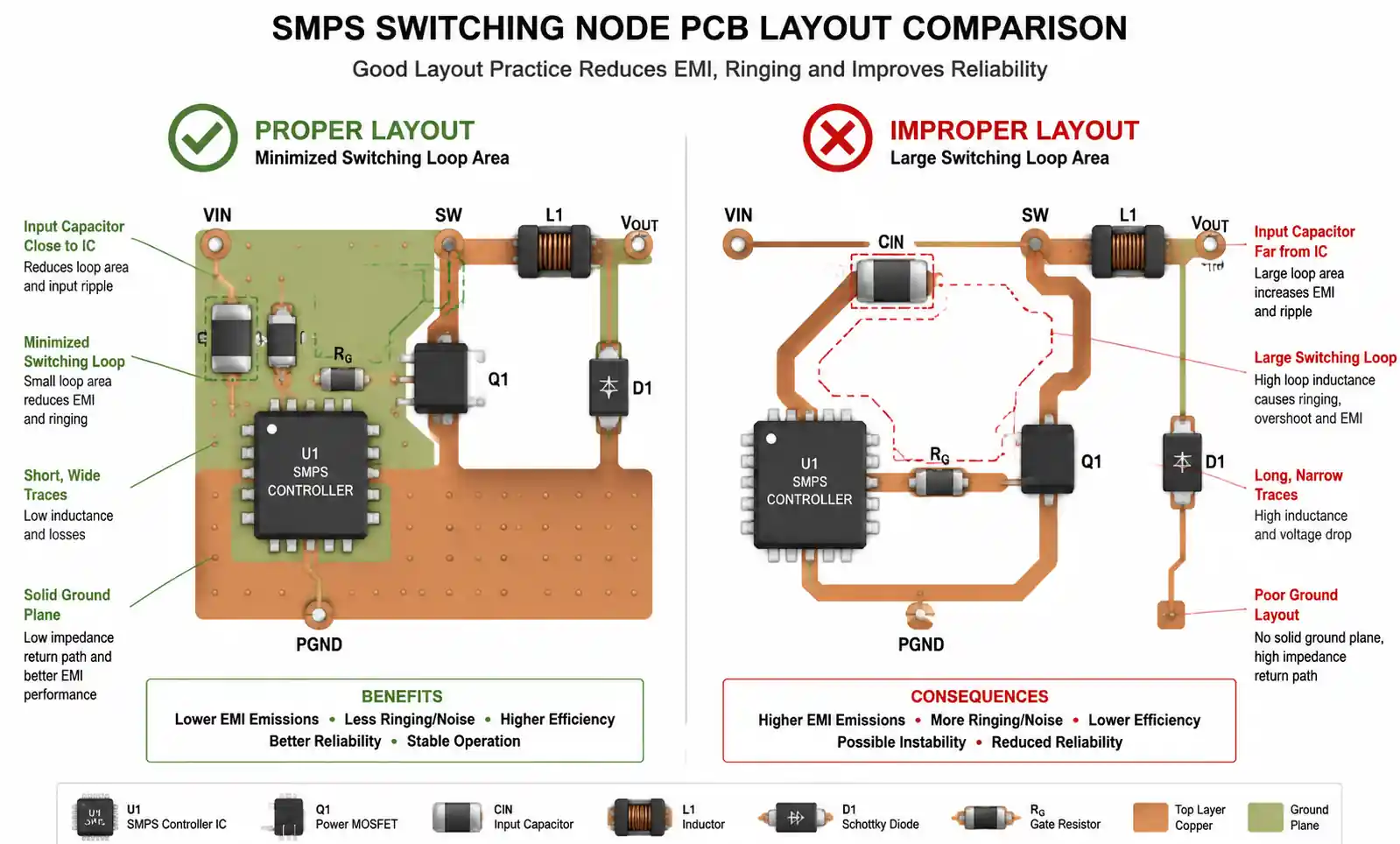
Erreurs de disposition du PCB
Les erreurs de disposition des circuits imprimés SMPS sont la principale cause de bruit, d’instabilité et de défaillances EMI. Le nœud de commutation — la connexion entre le transistor à interrupteur, l’inductance et la diode à roue libre ou le FET synchrone — transporte un courant élevé de di/dt et doit être minimisé en surface. Une grande boucle de nœud de commutation agit comme une antenne, rayonnant du bruit et se couplant dans des circuits sensibles.
Placez les condensateurs d’entrée et de sortie aussi près que possible des broches d’alimentation du circuit intégré. Utilisez des plans de masse, mais ne faites pas passer de courants de commutation haute fréquence à travers des pistes étroites ou des plans de masse fendus. Dédier une zone de masse solide pour les composants de l’étage de puissance, et connecter le retour de l’information et le circuit de contrôle analogiques à un point de masse silencieux (généralement la borne négative du condensateur de sortie).
Capacité insuffisante en entrée/sortie
Les condensateurs d’entrée doivent gérer le courant d’ondulation RMS du convertisseur, qui peut être important dans les convertisseurs buck. Les condensateurs céramiques (X5R ou X7R) à faible ESR sont préférés, mais plusieurs condensateurs en parallèle peuvent être nécessaires pour atteindre la capacité de courant ondulant. Sous-estimer le courant d’ondulation provoque une défaillance prématurée du condensateur et une augmentation de la tension d’entrée.
La capacité de sortie définit la tension de sortie et la réponse transitoire. Dans les applications à transitoires de charge rapides, la capacité globale doit être suffisante pour alimenter le courant de charge pendant le temps de réponse de la boucle de rétroaction. Les condensateurs électrolytiques en tantale ou polymère offrent une densité de capacité plus élevée que les céramiques, mais surveillent l’ESR et l’ESL à des fréquences élevées.
Erreurs de compensation de boucle
Les contrôleurs SMPS fonctionnent généralement en mode tension ou en mode courant, chacun nécessitant des stratégies de compensation différentes. Une marge de phase insuffisante (moins de 45 degrés) provoque des bourdonnements et une instabilité potentielle. Une marge de phase excessive (plus de 70 degrés) entraîne une réponse transitoire lente.
De nombreux ingénieurs s’appuient sur des conceptions de référence de fiche technique sans valider la stabilité de la boucle dans leurs conditions de fonctionnement spécifiques. La tension d’entrée, la tension de sortie, le courant de charge et même les parasites des circuits imprimés influencent la dynamique des boucles. Pour les conceptions de production, mesurez la réponse en boucle avec un analyseur réseau ou effectuez des tests transitoires de charge pour vérifier les marges de stabilité.
| Piège courant | Conséquence | Atténuation |
|---|---|---|
| Saturation de l’inductance au courant maximal | Perte d’efficacité, surchauffe, dommages potentiels | Sélectionnez l’ISAT > 1,3× courant de crête de l’inductance |
| Grande zone de boucle de nœud de commutation | EMI rayonnée, diaphonie | Minimiser la surface de boucle, utiliser le plan de masse |
| Courant d’ondulation insuffisant du condensateur d’entrée | Surchauffe du condensateur, défaillance | Somme du courant d’ondulation RMS, condensateurs multiples parallèles |
| Mauvais routage de trace de rétroaction | Injection de bruit, instabilité | Traces de rétroaction de routage à partir du nœud de commutation |
| Ignorer la conception thermique | Surchauffe de contrôleur ou de MOSFET | Calculez la dissipation de puissance, utilisez des vias thermiques |
| Sauter les tests transitoires de charge | Instabilité sous conditions de charge réelle | Tester avec une charge dynamique, vérifier la déviation de tension |
Ce tableau liste les erreurs de conception les plus fréquemment rencontrées et leurs conséquences. Abordez ces problèmes de manière systématique lors de la revue de conception afin d’éviter des respins coûteux de la carte ou des défaillances sur le terrain.
6. Considérations sur la chaîne d’approvisionnement et l’approvisionnement
Les circuits intégrés de gestion de l’énergie et les composants passifs pour les conceptions SMPS font face à des défis de chaîne d’approvisionnement qui peuvent impacter les délais et les coûts des projets. Des stratégies proactives d’approvisionnement et des pratiques de conception en fonction de la disponibilité réduisent les risques.
Disponibilité des circuits intégrés des contrôleurs et délais d’exécution
Les circuits intégrés de gestion d’alimentation à haut volume provenant de grands fournisseurs (Texas Instruments, Analog Devices, Infineon, ON Semiconductor) sont généralement plus accessibles que les pièces de niche ou source unique. En cas de pénurie de composants, les délais d’exécution pour les contrôleurs SMPS spécialisés peuvent s’étendre de 26 à 52 semaines.
Concevez avec des options de seconde source lorsque possible. Beaucoup de contrôleurs buck et boost proposent des alternatives compatibles ou fonctionnellement équivalentes. Si votre conception repose sur une pièce d’origine unique, maintenez des tampons d’inventaire plus élevés ou identifiez les remplacements immédiats dès le début du cycle de conception.
Approvisionnement passif en composants
Les inductances sont souvent les composants SMPS les plus limités en alimentation, en particulier dans les productions de qualité automobile ou à courant élevé. Les magnétiques personnalisés ont des délais de livraison plus longs que les pièces de catalogue. Standardisez les inductances de plusieurs fournisseurs (Coilcraft, Wurth, TDK, Murata) afin de maintenir la flexibilité des approvisionnements.
Les condensateurs céramiques avec des tensions et des valeurs de capacité spécifiques dans des boîtiers compacts (0603, 0805) peuvent être affectés en période de contrainte du marché. Concevez avec des valeurs de capacité standard et évitez de pousser trop près les limites de réduction de la tension — utilisez des condensateurs de 25V pour des applications 12V plutôt que des composants 16V.
Optimisation des coûts sans compromettre la performance

Dans la production en grande quantité, même les petites réductions de coûts des composants se multiplient. Cependant, optimiser les coûts en choisissant des inductances moins chères avec un DCR plus élevé ou des condensateurs de qualité inférieure avec une ESR plus élevée peut diminuer l’efficacité et la fiabilité à long terme.
Équilibrer coût et performance en visant l’efficacité à la charge typique plutôt qu’à la charge maximale, en acceptant une taille de composante légèrement plus grande pour utiliser des pièces plus facilement disponibles, ou en simplifiant les fonctionnalités de contrôle (par exemple, fonctionnement à fréquence fixe plutôt qu’à spectre étalé) si les exigences EMI le permettent.
| Type de composant | Risque de disponibilité | Stratégie d’atténuation |
|---|---|---|
| IC contrôleur SMPS | Moyen | Conception avec des alternatives compatibles aux broches |
| MOSFETs de puissance | Bas-moyen | Sources multiples approuvées, packages standards |
| Inducteurs (spécialité) | Haut | Pièces de catalogue auprès de plusieurs fournisseurs, premiers achats |
| Céramiques à haute capacité | Moyen | Valeurs standard, multiples tailles de boîtier approuvées |
| Schottky/redresseurs de synchronisation | Low | Pièces de base, sources multiples |
Ce tableau résume les risques de la chaîne d’approvisionnement pour les composants SMPS typiques. Pour les conceptions critiques, engagez rapidement les distributeurs afin de comprendre les délais et les allocations, et envisagez les stocks en consignation pour les composants à long terminaison.
7. FAQ
Quelle est la différence entre SMPS synchrone et asynchrone ?
Le SMPS synchrone remplace la diode à roue libre par un MOSFET, réduisant ainsi les pertes de conduction et améliorant l’efficacité de 3 à 8 %. Les conceptions asynchrones utilisent une diode Schottky, qui est plus simple et moins coûteuse mais dissipe plus de puissance. Choisissez le synchrone pour les applications alimentées par batterie ou à contrainte thermique, l’asynchrone pour les alimentations auxiliaires sensibles au coût.
Comment calculer la valeur requise de l’inductance pour un convertisseur buck ?
La valeur de l’inductance dépend de la fréquence de commutation, de la tension d’entrée/sortie, du courant de charge et du courant d’ondulation désiré. Un objectif de conception courant est un courant d’ondulation de 20 à 40 %. Utilisez la formule : L = (Vout × (Vin - Vout)) / (Vin × ΔIL × Fsw), où ΔIL est le courant d’ondulation et Fsw est la fréquence de commutation. Vérifier que la capacité de saturation dépasse le courant de crête.
Les SMPS peuvent-ils être utilisés dans des applications automobiles ?
Oui, mais les conceptions SMPS automobiles doivent répondre à la qualification AEC-Q100 pour les circuits intégrés, gérer les chutes de tension du vilebrequin à froid jusqu’à 3,5V, résister aux transitoires de décharge de charge jusqu’à 40V, et respecter les normes d’émissions conduites/rayonnées (CISPR 25). Utilisez des composants de qualité automobile et incluez une protection contre les passages d’entrée.
Qu’est-ce qui cause l’instabilité ou l’oscillation du SMPS ?
L’instabilité résulte généralement d’une compensation de boucle insuffisante, d’un décalage de phase excessif dans le réseau de rétroaction, ou de problèmes de disposition des circuits imprimés introduisant du bruit dans le chemin de rétroaction. La marge de phase de vérification dépasse 45 degrés sur toute la plage de fonctionnement. Une mauvaise mise à la terre ou une inductance parasite importante dans le condensateur de sortie peuvent également provoquer des oscillations.
Comment puis-je réduire les EMI d’une alimentation à commutation ?
Utilisez l’horloge à spectre étalé si le contrôleur le supporte, minimisez la zone de boucle de commutation sur le circuit imprimé, ajoutez des filtres d’entrée et de sortie (chokes en mode commun, condensateurs X/Y), utilisez des inductances blindées et implémentez une mise à la terre appropriée avec des plans continus. Des bords de manœuvre plus lents réduisent les EMI mais augmentent les pertes de commutation — équilibrez en fonction de vos limites d’émissions.
Quel est l’impact de la température de fonctionnement sur la performance des SMPS ?
L’efficacité diminue à haute température en raison de l’augmentation du RDS(on) et du DCR par inductance. Le courant de repos du contrôleur peut augmenter, affectant l’efficacité de la charge légère. L’ESR du condensateur augmente, dégradant la performance des ondulations. Vérifiez toujours que la conception thermique garantit que les températures de jonction restent dans les limites de la fiche technique dans les pires conditions ambiantes et de charge.
Existe-t-il des alternatives compatibles en broches si mon contrôleur SMPS devient obsolète ?
De nombreux contrôleurs buck et boost disposent d’équivalents fonctionnels de fournisseurs concurrents, bien que la compatibilité exacte des broches soit rare. Lors de la conception, documentez les paramètres critiques (fréquence de commutation, topologie de rétroaction, réseau de compensation) afin que les pièces équivalentes puissent être évaluées. Certains fabricants proposent des programmes de longévité garantissant une disponibilité pendant 10+ ans dans des applications industrielles et automobiles.
Quels tests sont nécessaires pour valider la conception des SMPS ?
Au minimum, efficacité de test sur toute la plage de charge, la régulation de la ligne et de la charge, la réponse transitoire aux étapes de charge, la ride d’entrée/sortie, et la performance thermique sous charge maximale. Pour les applications critiques en conformité, réalisez des tests d’émissions réalisés et rayonnés (EMI), des tests de déchargement de charge et de vilebrequin à froid (automobile), ainsi que des tests d’isolation de sécurité (médicaux/AC-DC).
8. Conclusion et étapes recommandées
Sélectionner et concevoir avec des alimentateurs à commutation nécessite d’équilibrer l’efficacité, le coût, la disponibilité des composants et la complexité de conception avec les exigences spécifiques de votre application. Les convertisseurs buck dominent la régulation au point de charge dans les systèmes à batterie et numériques en raison de leur grande efficacité et de leur simplicité de conception. Les convertisseurs boost servent les pilotes LED et les applications de secours de batterie. Les topologies buck-boost et isolées répondent à de larges plages d’entrée et aux exigences d’isolation de sécurité au détriment de composants supplémentaires et d’efforts de conception.
Si votre application privilégie l’efficacité et fonctionne avec une tension d’entrée stable supérieure à votre exigence de sortie, commencez par un convertisseur buck synchrone. Si la tension d’entrée varie considérablement ou dépasse votre tension de sortie cible, évaluez les topologies buck-boost ou SEPIC. Pour les conceptions isolées, les convertisseurs flyback offrent le meilleur équilibre entre coût et performance en dessous de 100W.
Avant de finaliser votre conception, validez la stabilité de la boucle dans les pires conditions de fonctionnement, vérifiez les performances thermiques avec des profils de charge réalistes, et effectuez des tests de pré-conformité EMI si votre produit est soumis aux exigences réglementaires. Engagez tôt les fournisseurs de composants pour comprendre les délais d’exécution des inductances et des circuits intégrés spécialisés, et concevoir avec des options de seconde source afin de réduire les risques dans la chaîne d’approvisionnement.
Pour un support technique complémentaire, consultez les notes d’application des principaux fabricants de contrôleurs SMPS, téléchargez des conceptions de référence correspondant à votre topologie et à votre niveau de puissance, et envisagez d’utiliser des outils de conception en ligne qui automatisent la sélection des composants et les calculs de compensation de boucles. Si votre conception implique des niveaux de puissance élevés (au-dessus de 100W), des topologies isolées ou des exigences strictes d’EMI, consulter un ingénieur des applications de terrain (FAE) peut éviter des itérations de conception coûteuses.