

Guide de sélection de la technologie MEMS : Choisir les bons systèmes micro-électromécaniques pour votre application
Public cible : Ingénieurs en électronique, chefs d’équipe R&D, concepteurs de produits, responsables achats et décideurs techniques travaillant avec l’intégration des capteurs, les dispositifs IoT, les systèmes automobiles et l’électronique grand public.
Table des matières
- [Introduction : Comprendre les MEMS dans la technologie moderne des semi-conducteurs] (#1-introduction-understanding-mems-in-modern-semi-conductor-technology)
- Paramètres techniques clés des dispositifs MEMS
- Types MEMS et sélection spécifique à l’application
- [Comparaison de performance : MEMS vs capteurs traditionnels] (#4-comparaison-performance-mems-vs-capteurs-traditionnels)
- [Considérations de conception et écueils courants d’implémentation] (#5-considérations-de-conception-et-pièges-d’implémentation-communs)
- [Considérations sur la chaîne d’approvisionnement et l’approvisionnement] (#6-Considérations de la chaîne d’approvisionnement et des approvisionnements)
- FAQ
- [Conclusion et prochaines étapes] (#8-conclusion-et-prochaines-étapes)
1. Introduction : Comprendre les MEMS dans la technologie moderne des semi-conducteurs
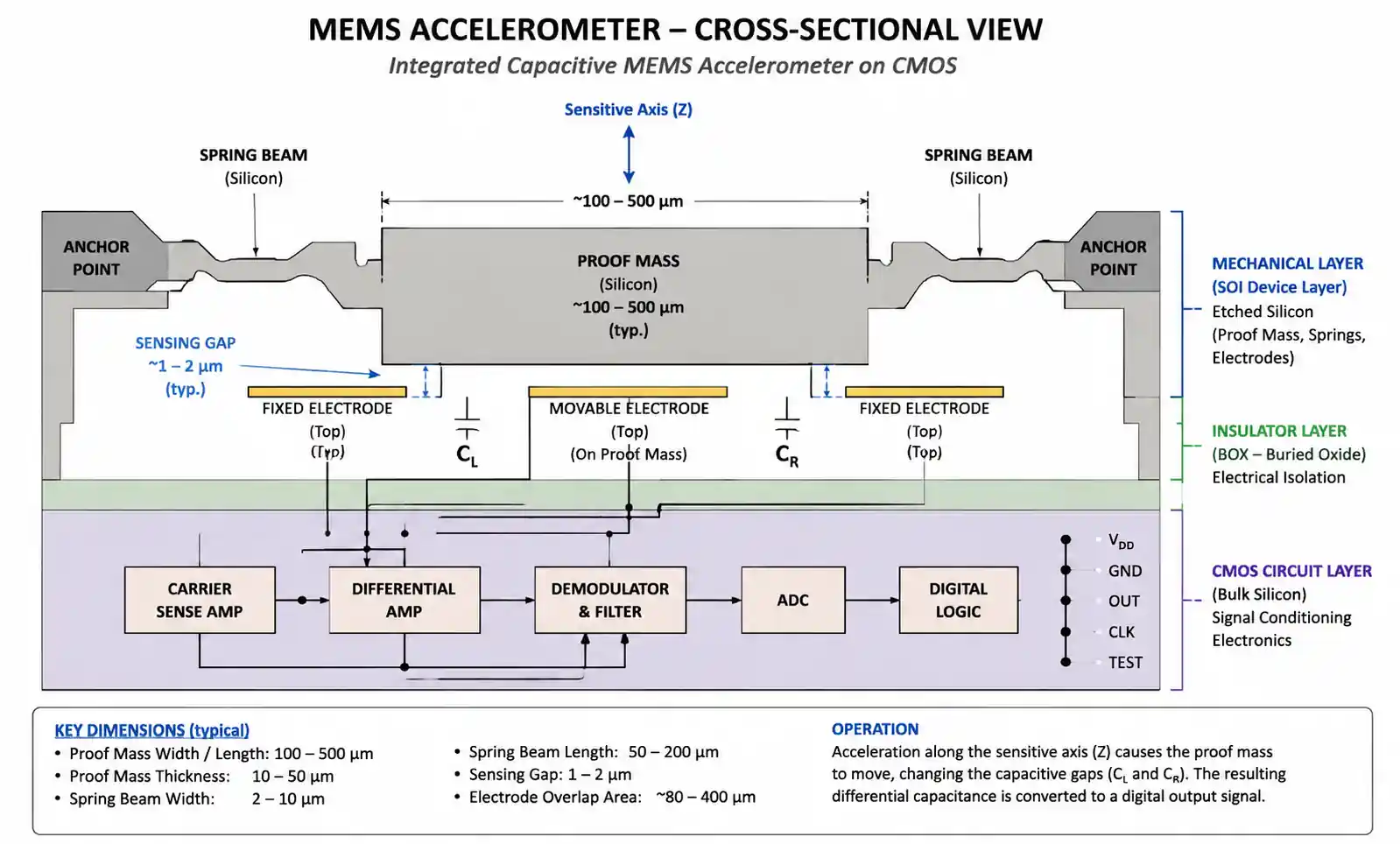
Les systèmes micro-électromécaniques (MEMS) représentent une intersection critique entre le génie mécanique et la technologie des semi-conducteurs, intégrant des structures mécaniques microscopiques avec des circuits électroniques sur un seul substrat en silicium. Contrairement aux capteurs discrets traditionnels, les dispositifs MEMS exploitent des procédés de fabrication de semi-conducteurs — y compris le microusinage de surface, le microusinage en masse et le collage de plaquettes — pour créer des capteurs et actionneurs miniaturisés avec des rapports performance/taille sans précédent.
Le marché mondial des MEMS s’est considérablement développé dans les domaines automobile, industriel, électronique grand public et médical. Les ingénieurs font face à une pression croissante pour choisir des composants MEMS équilibrant sensibilité, consommation d’énergie, taille du boîtier et coût tout en respectant des exigences de fiabilité strictes. Ce guide fournit des critères de sélection pratiques basés sur des contraintes de conception réelles et vous aide à éviter les erreurs courantes de conceptions qui peuvent entraîner des refontes coûteuses.
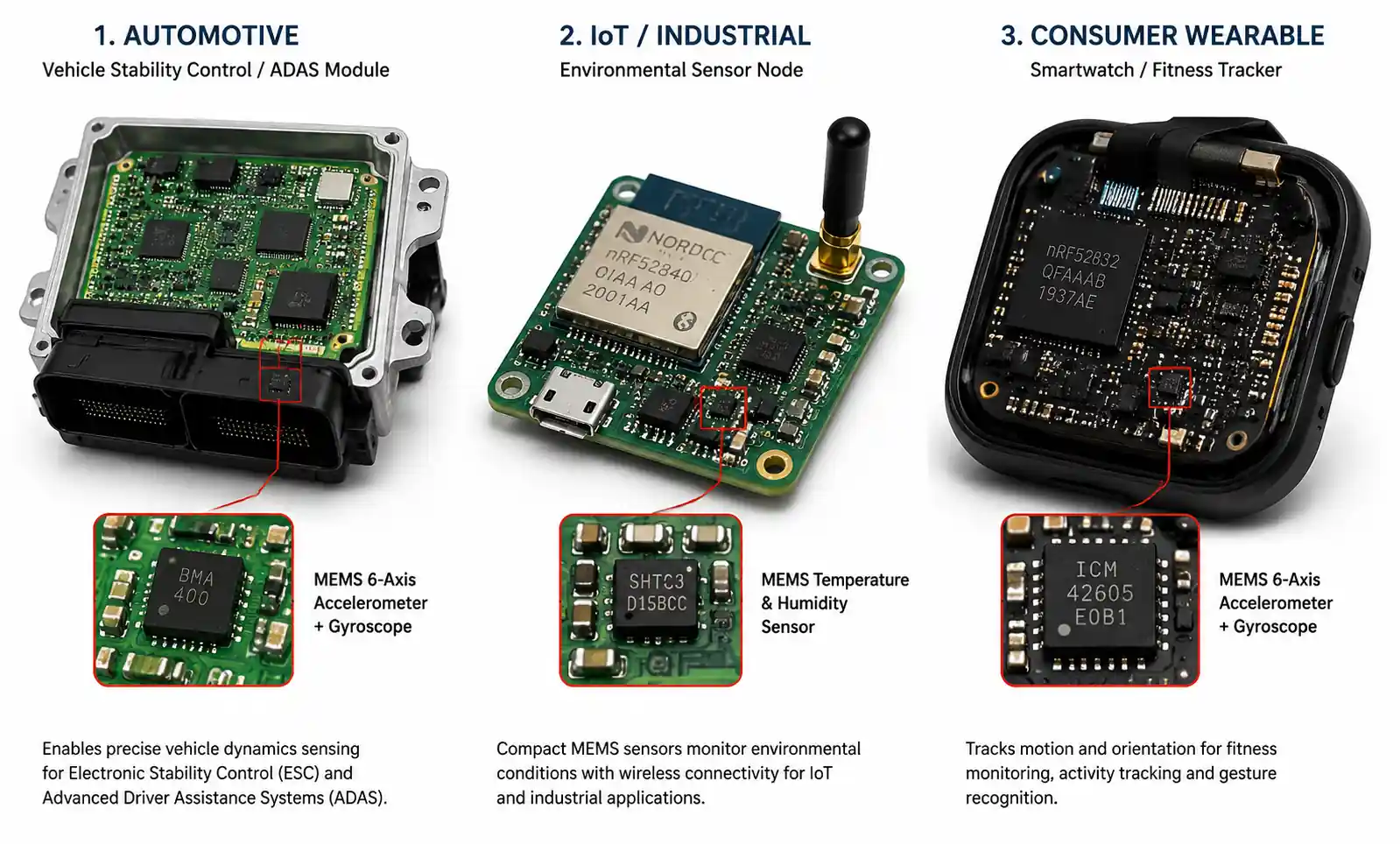
Que vous conceviez un nœud capteur IoT nécessitant une consommation d’énergie ultra-faible, un système de sécurité automobile exigeant une certification AEC-Q, ou un appareil portable grand public privilégiant des emballages compacts, comprendre les compromis entre les différentes technologies MEMS est essentiel pour un choix optimal des composants.
2. Paramètres techniques clés des dispositifs MEMS
Lors de l’évaluation des composants MEMS pour votre conception, plusieurs paramètres techniques impactent directement la performance du système. Comprendre ces spécifications et leurs implications techniques est essentiel pour une bonne sélection.
2.1 Sensibilité et plage de mesure
La sensibilité MEMS définit la variation du signal de sortie par unité de grandeur physique mesurée. Pour les accéléromètres, cela s’exprime généralement en mV/g ou en LSB/g pour les sorties numériques. Une sensibilité plus élevée améliore le rapport signal/bruit mais réduit souvent la portée de mesure. Une erreur de conception courante consiste à sélectionner la sensibilité maximale sans prendre en compte la plage d’accélération attendue dans votre application — cela peut entraîner une saturation du capteur en fonctionnement normal.
Pour les capteurs de pression, la sensibilité s’exprime en mV/kPa ou mV/V/kPa, avec des plages de sortie à l’échelle réelle généralement de 10 mV à 100 mV pour les capteurs analogiques. Lors de la sélection de MEMS de pression pour des applications médicales ou industrielles, vérifiez que la spécification de sensibilité correspond aux exigences de résolution de votre ADC et prend en compte la dérive induite par la température.
2.2 Consommation d’énergie et modes de fonctionnement
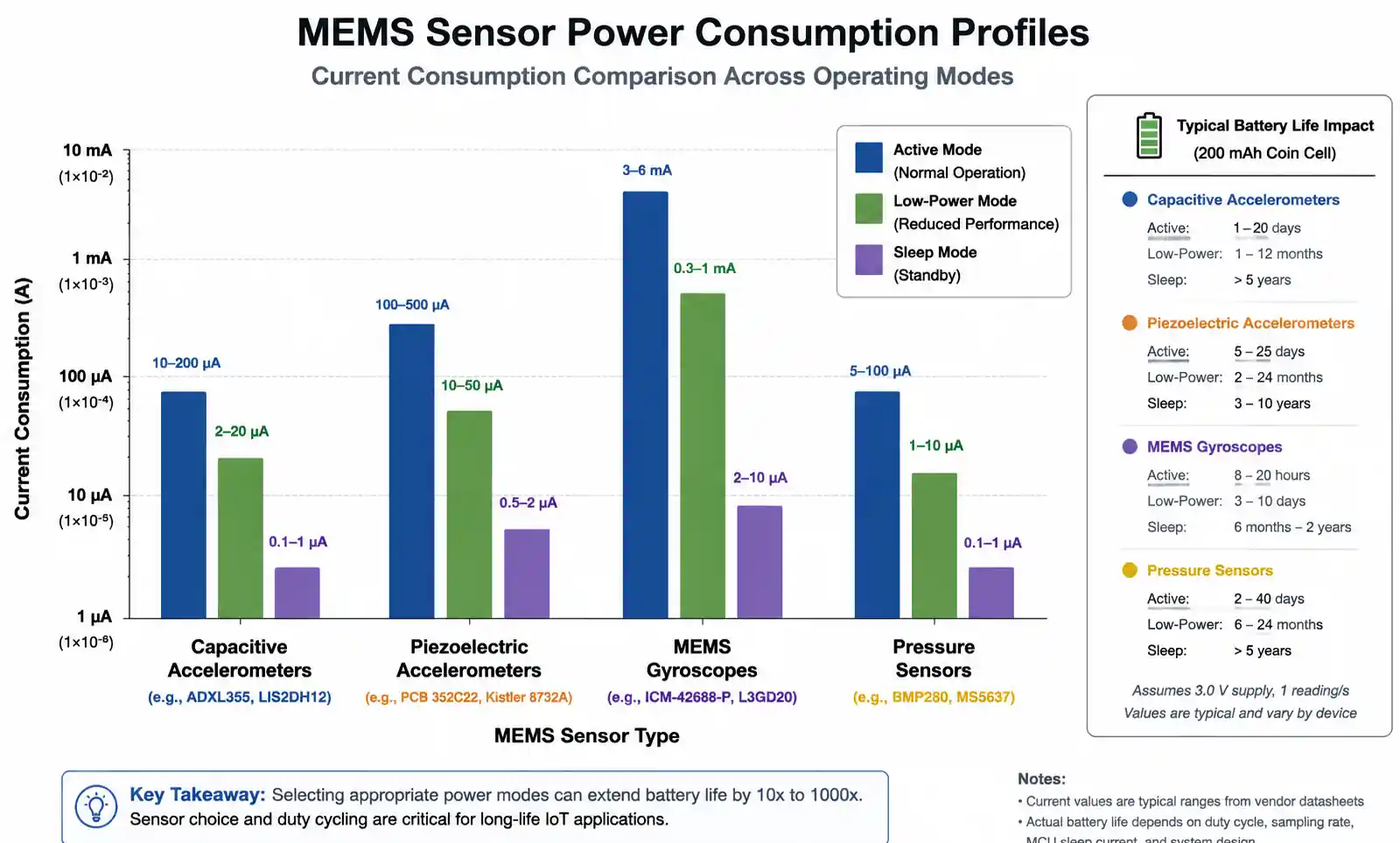
La consommation d’énergie MEMS varie considérablement selon l’architecture du dispositif et son mode de fonctionnement. Les accéléromètres MEMS capacitifs consomment généralement 10 à 200 μA en mode continu, tandis que les conceptions piézoélectriques peuvent nécessiter 100 à 500 μA. Pour les applications IoT alimentées par batterie, il faut prêter une attention particulière au courant en mode veille (souvent 1–5 μA) et au temps de réveil, car le fonctionnement en cycle de service impacte significativement sur la puissance totale du système.
Les gyroscopes consomment généralement plus d’énergie que les accéléromètres en raison de leur besoin d’oscillation mécanique continue. Un gyroscope MEMS typique consomme 3 à 6 mA lors de la mesure active, rendant l’architecture de gestion de l’énergie critique dans les appareils portables. Envisagez des MEMS avec gestion d’alimentation intégrée ou des modes faible consommation qui peuvent être synchronisés avec les cycles de sommeil de votre MCU.
2.3 Densité et résolution du bruit
La densité de bruit, mesurée en μg/√Hz pour les accéléromètres ou en °/s/√Hz pour les gyroscopes, détermine le signal détectable minimum. Une densité de bruit plus faible permet des mesures à plus haute résolution mais peut se faire au détriment d’une consommation d’énergie accrue ou d’une taille de puce plus grande. Pour des applications de haute précision comme la navigation inertielle ou la surveillance sismique, une densité de bruit inférieure à 25 μg/√Hz est généralement requise.
La relation entre densité de bruit et bande passante est cruciale — réduire votre bande passante de mesure grâce au filtrage numérique peut améliorer la résolution efficace. Cependant, assurez-vous que la conception de votre filtre n’introduise pas un décalage de phase excessif si la réponse en temps réel est importante pour votre boucle de contrôle ou votre fonction de sécurité.
3. Types de MEMS et sélection spécifique à l’application
Différentes technologies de détection MEMS offrent des avantages distincts selon les besoins de votre application. Cette section fournit des conseils de sélection basés sur des scénarios de conception courants.
Accéléromètres MEMS 3.1
| Paramètre | MEMS capacitifs | MEMS Piézoélectriques | MEMS piézorésistifs |
|---|---|---|---|
| Plage de mesure | ±2g à ±16g (consommateur) ±50g à ±200g (automobile) |
±50g à ±500g | ±2g à ±250g |
| Réponse en fréquence | DC à 1 kHz | 1 Hz à 10 kHz+ | DC à 5 kHz |
| Consommation d’énergie | 10–200 μA | 100–500 μA | 50–300 μA |
| Stabilité de la température | Excellent | Bon (nécessite une rémunération) | Modéré (dérive élevée) |
| Meilleures applications | Détection d’inclinaison, détection de mouvement, appareils grand public | Surveillance des vibrations, détection de chocs, capteurs de collision | Environnement hostile, applications à haute gravité |
| Fourchette de coût typique | 0,50 $ à 3,00 $ | 2,00 $ à 8,00 $ | 3,00 $ à 12,00 $ |
Les accéléromètres MEMS capacitifs dominent les applications grand public et mobiles grâce à leur excellente réponse en courant continu, leur faible consommation d’énergie et leur rentabilité. Ils mesurent l’accélération en détectant les variations de capacité dans les masses de preuve micro-usinées suspendues par des structures de ressort. Pour la détection de l’orientation des smartphones ou le suivi de la fitness, les accéléromètres capacitifs avec une plage de ±2g à ±8g et une résolution de 12 à 16 bits sont généralement optimaux.
Les MEMS piézoélectriques excellent dans les applications de surveillance des vibrations à haute fréquence telles que la maintenance prédictive dans les équipements industriels ou la détection de cliquetis automobiles. Leur incapacité à mesurer les signaux DC (ils sont couplés en courant alternatif par nature) les rend inadaptés à la détection d’inclinaison mais idéaux pour l’analyse dynamique des vibrations où des fréquences supérieures à 1 Hz sont d’intérêt.
Gyroscopes MEMS 3.2
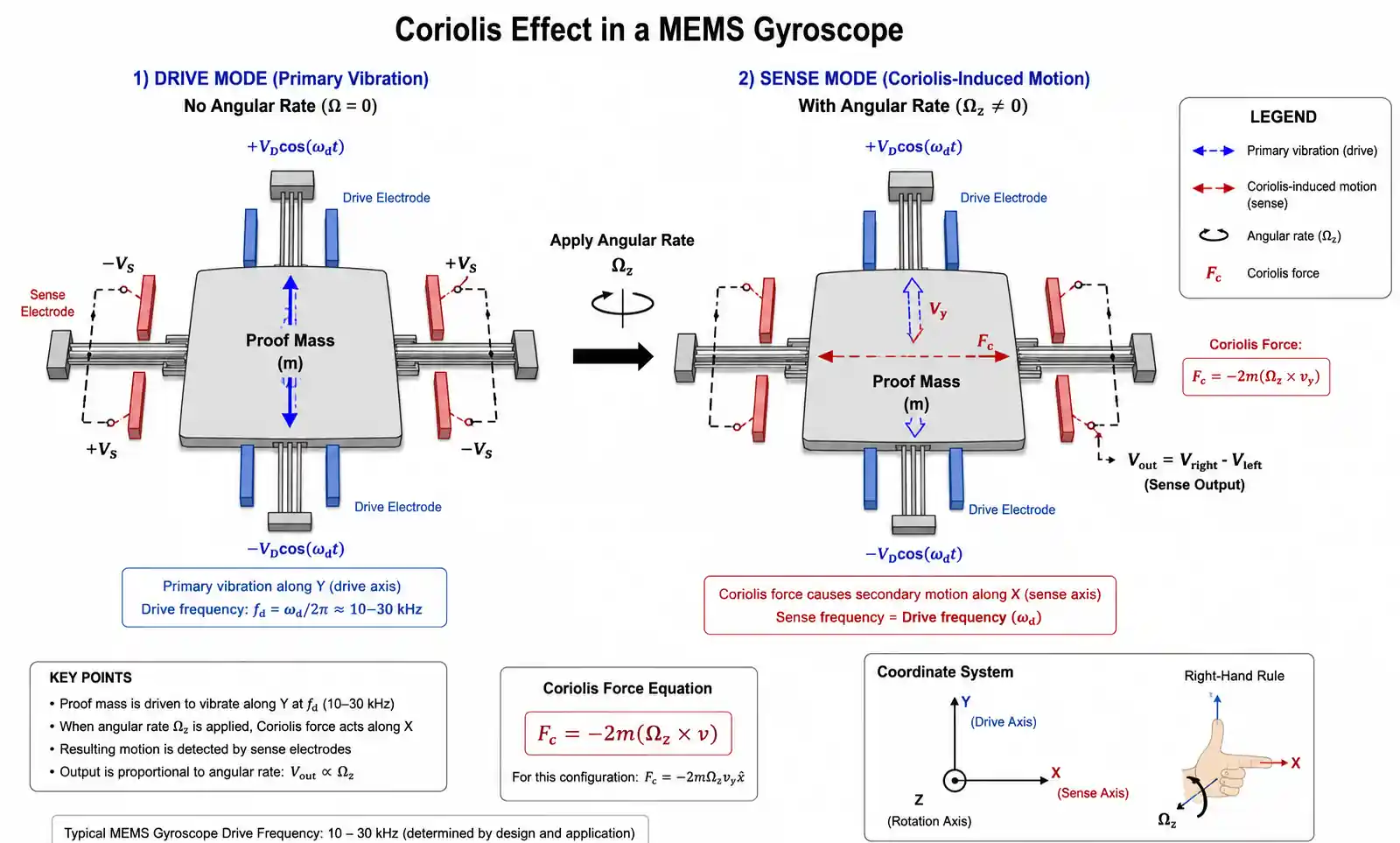
Les gyroscopes MEMS mesurent la vitesse angulaire à l’aide de l’effet de Coriolis sur les microstructures vibrantes. La sélection dépend principalement de votre précision requise, des spécifications de dérive et du budget de puissance.
| Type de candidature | Exigence de portée | Stabilité de biais nécessaire | Architecture recommandée |
|---|---|---|---|
| Électronique grand public (jeux, AR/VR) | ±250 à ±2000°/s | 10–50°/h | Catégorie grand public à un ou 3 axes, |
| Stabilisation par drone | ±500 à ±2000°/s | 5–20°/h | Moteur automobile 3 axes avec réponse rapide |
| Automobile (ESC, ADAS) | ±300°/s | <10°/h, AEC-Q100 qualifié | Qualité automobile avec auto-test |
| Robotique industrielle | ±100 à ±500°/s | 1–5°/h | Qualité tactique haute performance |
| Navigation inertielle | ±100°/s | <0,1°/h | Tactique ou de qualité navigation (coûteux) |
La stabilité du biais (également appelée stabilité de polarisation en cours de course) est souvent mal comprise mais d’une importance cruciale pour toute application nécessitant une estimation d’angle par intégration. Un gyroscope avec une stabilité de polarisation de 10°/h accumulera 10 degrés d’erreur par heure même lorsqu’il est stationnaire — cette dérive doit être compensée par fusion de capteurs avec des accéléromètres ou magnétomètres.
3,3 Capteurs de pression MEMS
Les capteurs de pression MEMS utilisent des éléments de détection piézorésistifs ou capacitifs sur des diaphragmes en silicium. Les facteurs clés de sélection incluent la plage de pression, la compatibilité des supports et le type de boîtier (pression absolue, manomètre ou différentielle).
Pour les capteurs de pression absolue (MAP) automobiles, la spécification typique est de 20 à 250 kPa avec une précision de ±1 % de -40°C à 125°C. La surveillance médicale de la tension artérielle nécessite une précision plus élevée (±0,5 %) et une certification en biocompatibilité. Le contrôle industriel des procédés nécessite souvent une isolation des médias en acier inoxydable et des sorties en boucle de courant de 4 à 20 mA.
Lorsque vous sélectionnez des capteurs de pression MEMS, vérifiez que la précision spécifiée inclut les effets de la température sur toute votre plage de fonctionnement — de nombreuses fiches techniques listent la précision à température ambiante séparément du coefficient de décalage (TCO) et du coefficient de sensibilité (TCS), qui doivent être combinés pour l’analyse du bilan total d’erreur.
4. Comparaison de performances : MEMS vs capteurs traditionnels
Comprendre quand la technologie MEMS offre des avantages clairs par rapport aux approches de détection conventionnelles permet d’optimiser à la fois la performance et le coût.
| Type de capteur | Avantage MEMS | Avantage des capteurs traditionnels | Point de croisement |
|---|---|---|---|
| Accéléromètres | Taille, puissance, coût, intégration | Capacité de haute gravité (>500g), fréquence extrêmement basse (<0,01 Hz) | Au-dessus de ±200g ou mesures DC |
| Gyroscopes | Taille, coût, démarrage rapide | Ultra-haute précision (navigation grade), très faible dérive | Stabilité de polarisation <0,1°/h requise |
| Microphones | Réponse en fréquence plate, faible consommation, emballage SMD | Haut niveau de pression sonore (>130 dB SPL) | Enregistrement audio professionnel |
| Oscillateurs | Résistance aux chocs, faible consommation, programmabilité | Bruit de phase ultra-faible, stabilité extrême de la température | Applications télécom/RF nécessitant un bruit de phase de -140 dBc/Hz |
Les dispositifs MEMS réalisent une réduction spectaculaire de taille grâce à la fabrication par lots de semi-conducteurs — un accéléromètre MEMS occupe moins de 4 mm² contre 100+ mm² pour un accéléromètre piézoélectrique conventionnel. Cet avantage d’intégration permet d’utiliser des écouteurs véritablement sans fil, où les contraintes d’espace rendent les capteurs traditionnels peu pratiques.
Cependant, les capteurs MEMS ne peuvent généralement pas égaler les performances finales de capteurs plus grands et discrets dans des conditions extrêmes. La détection sismique haut de gamme repose toujours sur des accéléromètres à équilibrage des forces, et les gyroscopes à fibre optique restent supérieurs pour les applications de navigation nécessitant une stabilité de <0,01°/h. La décision dépend de la question de savoir si les exigences de performance de votre application relèvent des capacités MEMS, qui se sont continuellement améliorées tandis que les coûts ont diminué.
5. Considérations de conception et pièges courants de mise en œuvre
L’intégration réussie du MEMS nécessite une attention particulière à la disposition des circuits imprimés, à la conception de l’alimentation et à une bonne compréhension des systèmes de coordonnées des capteurs et des interfaces de sortie.
Disposition du circuit imprimé 5.1 et montage mécanique
Les capteurs MEMS contiennent des structures mécaniques microscopiques pouvant être affectées par le couplage de contrainte et de vibration du PCB. Montez les accéléromètres et gyroscopes MEMS loin des bords de la carte et des trous de fixation, de préférence près de l’axe neutre mécanique de la carte. Évitez de les placer près de composants volumineux qui pourraient créer des gradients thermiques.
Pour une précision maximale, minimisez la distance entre le dispositif MEMS et le point de référence de montage. Dans les applications mesurant le mouvement de rotation, chaque millimètre de décalage introduit une accélération tangentielle qui contamine votre mesure du gyroscope. Documentez l’emplacement exact du capteur pour que vos ingénieurs mécaniques puissent calculer correctement les transformations de coordonnées.
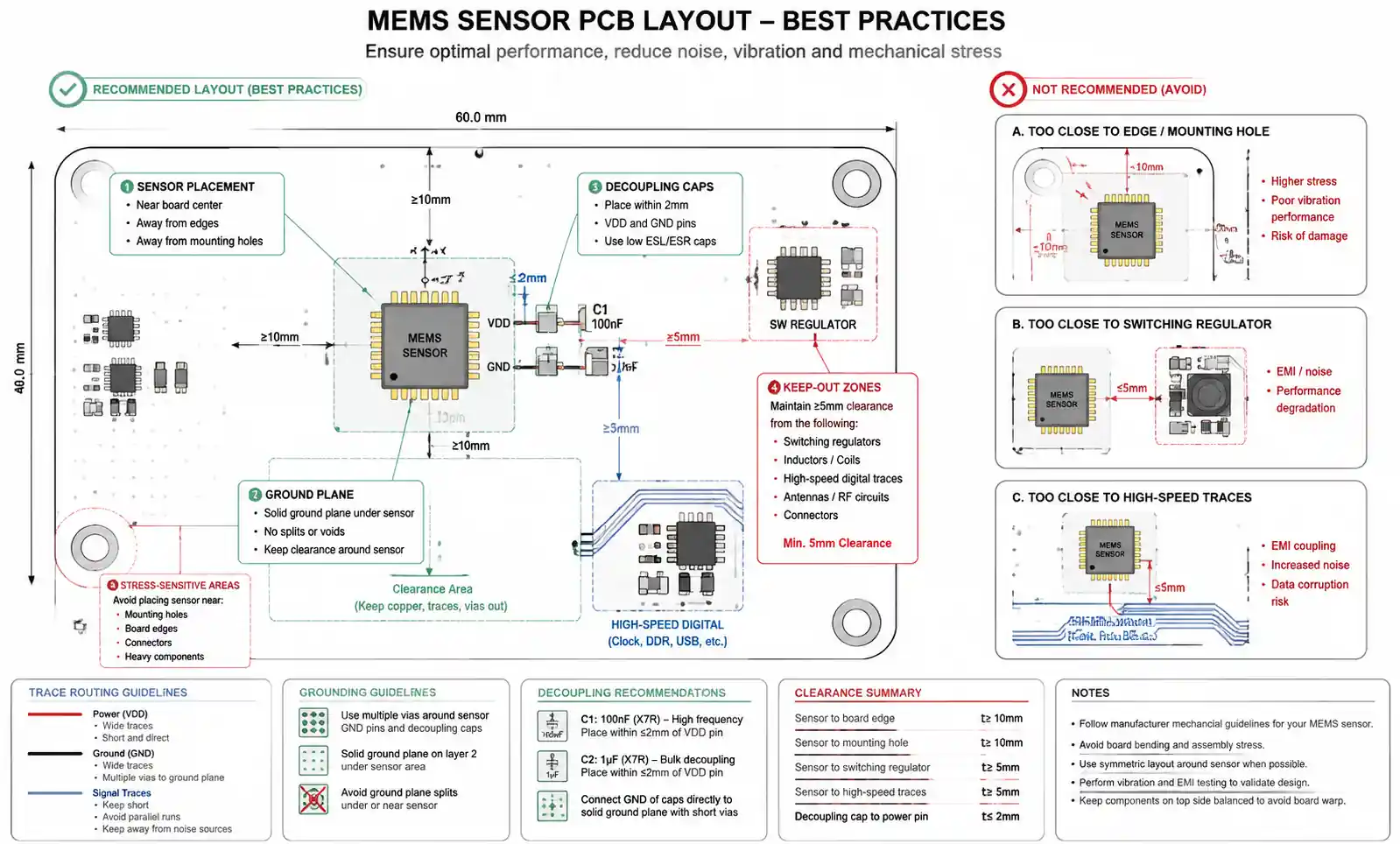
Une erreur critique consiste à acheminer des signaux numériques à haute vitesse ou à installer des alimentations à découpage près des sorties analogiques MEMS. Même avec des interfaces différentielles, les interférences électromagnétiques peuvent se coupler dans les structures de masse sensibles de preuve. Utilisez des plans au sol et maintenez au moins 5 mm de dégagement par rapport aux sources de bruit. Pour les interfaces numériques SPI ou I²C, des condensateurs de terminaison et de dérivation appropriés selon les spécifications de la fiche technique sont essentiels pour éviter les erreurs de communication.
5.2 Filtrage et découplage de l’alimentation
Les appareils MEMS nécessitent des alimentations propres et stables—généralement de 1,8 V à 3,3 V avec une ondulation de <50 mV. Placez les condensateurs de découplage aussi près que possible des broches VDDIO et VDD, en utilisant une combinaison de condensateurs en céramique à 100 nF (X7R ou X5R) et à 10 μF en vraque. Le condensateur céramique doit être à moins de 2 mm de la broche d’alimentation afin de supprimer efficacement le bruit à haute fréquence.
Certains accéléromètres et gyroscopes MEMS incluent des régulateurs de tension internes, mais le bruit d’alimentation externe peut tout de même se coupler à travers les effets de substrat. Pour les applications de précision, envisagez d’utiliser un régulateur dédié à faible coupure (LDO) avec un bruit de sortie de <40 μVrms plutôt que de partager l’alimentation principale du système. Cela devient crucial lorsque le MEMS partage une carte avec des émetteurs RF, des convertisseurs DC-DC ou des pilotes moteur.
5.3 Calibration et fusion des capteurs
Les capteurs MEMS prêts à l’emploi ont généralement une tolérance de sensibilité de ±3 % et des erreurs de décalage de ±50 mg (pour les accéléromètres) ou ±3°/s (pour les gyroscopes). Pour les applications nécessitant une meilleure précision, implémentez la calibration d’usine ou sur le terrain. La calibration multipoint à travers la température améliore la précision à ±1 % ou plus.
L’intégration par dérive du gyroscope accumule rapidement des erreurs d’angle sans correction. Des filtres complémentaires ou filtres de Kalman qui fusionnent les références gravitationnelles de l’accéléromètre avec des mesures gyroscopiques sont essentiels pour le suivi de l’orientation. Sachez que les mesures de l’accéléromètre incluent à la fois la gravité et l’accélération linéaire — votre algorithme de fusion doit distinguer entre inclinaison et véritable mouvement linéaire.
5.4 Tests de stress environnemental
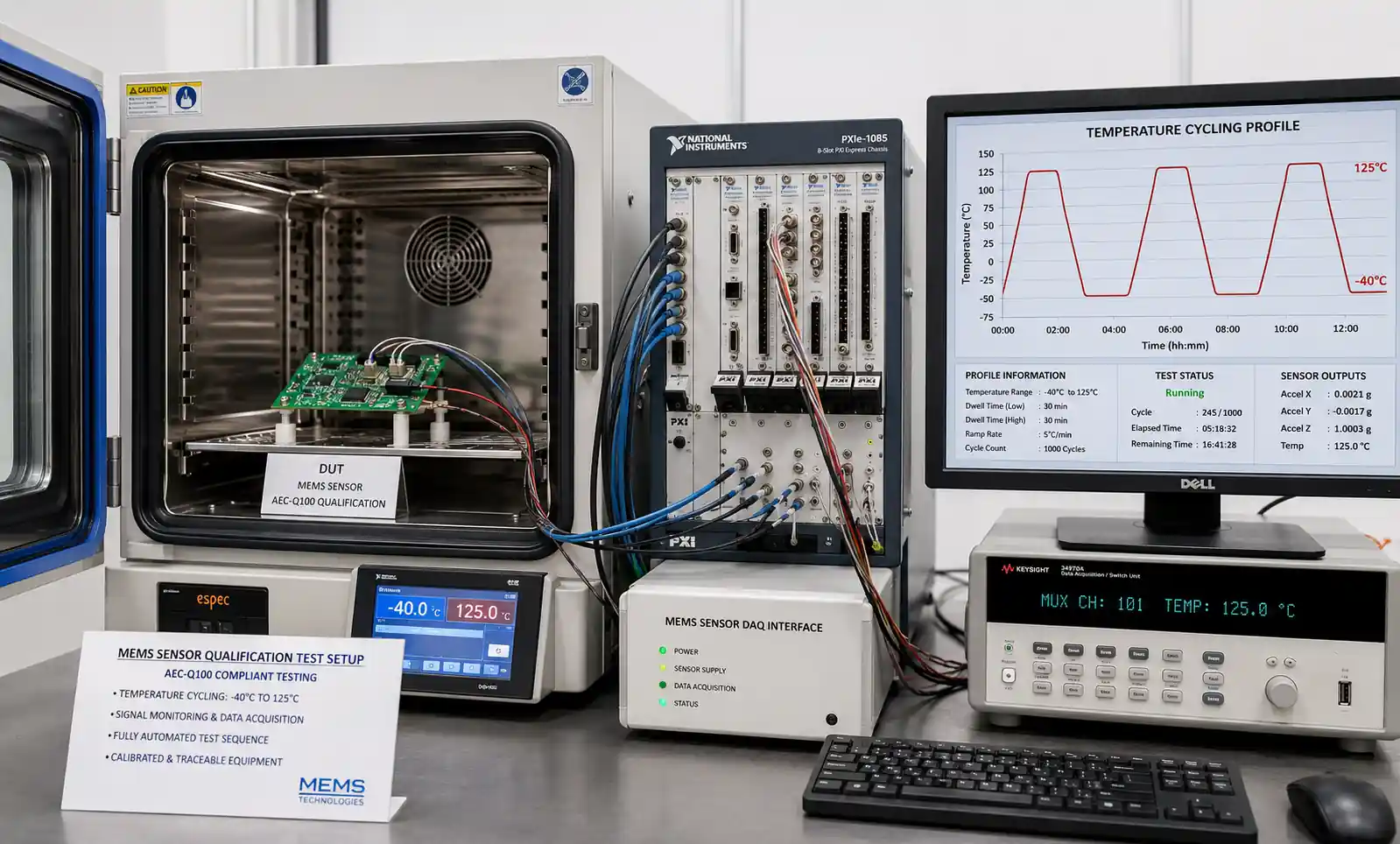
La fiabilité des MEMS dépend fortement d’une qualification environnementale appropriée. Pour les applications automobiles, les dispositifs doivent respecter les normes AEC-Q100, y compris la durée de vie de fonctionnement à haute température (HTOL), le cycle de température et les tests de choc mécanique. Les MEMS grand public peuvent ne pas survivre aux cycles thermiques automobiles de -40°C à 125°C ni aux profils de chocs mécaniques typiques des accidents automobiles.
L’humidité peut affecter la performance des MEMS, en particulier pour les appareils équipés de ports acoustiques (capteurs de pression, microphones). Un revêtement conformal du PCB est recommandé, mais évitez de couvrir l’ouverture du port MEMS. Certains capteurs de pression incluent une protection gel au-dessus du diaphragme de détection pour l’isolation du média — vérifiez que cela convient à votre fluide mesuré.
6. Considérations sur la chaîne d’approvisionnement et l’approvisionnement
Les dispositifs MEMS sont fabriqués par un nombre relativement restreint de fournisseurs en utilisant des procédés spécialisés, ce qui rend la gestion de la chaîne d’approvisionnement importante pour les longs cycles de vie des produits.
6.1 Principaux fournisseurs et délais de livraison MEMS
| Fournisseur | Lignes de produits clés | Délai d’exécution typique | Quantité minimale de commande | Certifications clés |
|---|---|---|---|---|
| Bosch Sensortec | Accéléromètres, gyroscopes, capteurs de pression, capteurs environnementaux | 12–16 semaines | 3 000–5 000 pièces | AEC-Q100, IATF 16949 |
| STMicroélectronique | IMU, accéléromètres, gyroscopes, microphones MEMS | 14–20 semaines | 5 000–10 000 pièces | AEC-Q100, ISO 26262 |
| InvenSense (TDK) | IMU haute performance, gyroscopes, capteurs de pression | 12–18 semaines | 2 500–7 500 pièces | AEC-Q100 |
| Dispositifs analogiques | Accéléromètres MEMS de précision, gyroscopes | 16–24 semaines | 1 000 à 3 000 pièces (selon la note) | AEC-Q100, qualifié aérospatial |
| Infineon | Microphones MEMS, capteurs de pression | 12–16 semaines | 5 000 pièces | Diplômé automobile |
Les délais d’exécution se sont considérablement allongés ces dernières années en raison des contraintes de capacité dans les fonderies MEMS et de la demande automobile accrue. Pour une production à grande volée, engagez les fournisseurs dès le début de la phase de conception et envisagez des accords d’approvisionnement à long terme. De nombreux fabricants MEMS proposent des échantillons d’ingénierie avec des délais de traitement plus courts pour le prototypage, mais la transition vers les commandes de production nécessite une planification à l’avance 6 à 9 mois.
6.2 Gestion de l’obsolescence et de la seconde source
Les produits MEMS ont généralement des cycles de vie de 7 à 10 ans, plus courts que ce que nécessitent de nombreuses applications industrielles ou automobiles. Surveillez de près les notifications de changement de produit (PCN) et les annonces de fin de vie (EOL). Lorsqu’un capteur MEMS approche de la fin de la vie, la migration vers une nouvelle génération nécessite souvent des modifications du firmware en raison de spécifications de sensibilité, de protocoles de communication ou de broyages de boîtier différents.
La véritable seconde source pour les MEMS est difficile car chaque appareil de fabricant possède des caractéristiques uniques. Même les pièces « compatibles » de différents fournisseurs nécessitent des mises à jour d’étalonnage et des tests de validation. Pour les applications critiques, négocier les quantités d’achat de dernière fois ou envisager des alternatives compatibles avec les broches identifiées lors de la phase initiale de conception.
Collaborez avec des distributeurs agréés comme Digi-Key, Mouser ou Arrow, qui assurent une visibilité et une traçabilité des stocks en temps réel pour éviter les contrefaits. Les capteurs MEMS contrefaits, bien que moins courants que pour les circuits intégrés, existent sur le marché — en particulier pour les appareils automobiles ou industriels de grande valeur.
7. FAQ
Quelle est la différence entre les MEMS et les capteurs à semi-conducteurs traditionnels ?
Les dispositifs MEMS intègrent des structures mécaniques (comme des masses en suspension, des diaphragmes ou des faisceaux résonants) avec des circuits électroniques sur une seule puce en silicium, utilisant des techniques de fabrication à semi-conducteurs. Les capteurs à semi-conducteurs traditionnels, tels que les capteurs à effet Hall ou les photodiodes, reposent uniquement sur des propriétés électroniques sans structures mécaniques. Cette intégration mécanique-électrique permet aux MEMS de mesurer des grandeurs physiques telles que l’accélération, la pression ou la rotation avec d’excellents avantages de taille, de puissance et de coût par rapport aux capteurs mécaniques discrets.
Comment choisir entre des capteurs MEMS de sortie analogique et numérique ?
Les capteurs analogiques MEMS fournissent des sorties de tension ou de courant proportionnelles à la quantité mesurée, nécessitant un ADC externe et offrant une flexibilité maximale dans le traitement du signal. Choisissez des sorties analogiques lorsque vous avez besoin d’un filtrage personnalisé, de fréquences d’échantillonnage très élevées (>10 kHz), ou lors de l’intégration avec des chaînes de signal analogiques existantes. Les capteurs numériques MEMS (SPI, I²C) incluent des ADC intégrés, une compensation de température et des fonctions d’auto-test, simplifiant la conception du système et réduisant le nombre de composants. Les interfaces numériques sont préférées pour la plupart des conceptions modernes, sauf si la fréquence d’échantillonnage ou les exigences de personnalisation exigent l’analogie.
Quelle classification AEC-Q100 me faut-il pour les applications MEMS automobiles ?
La qualification AEC-Q100 définit les grades de température automobiles : Grade 0 (-40°C à 150°C) pour le compartiment moteur, Grade 1 (-40°C à 125°C) pour l’automobile générale, Grade 2 (-40°C à 105°C) pour l’habitacle, et Grade 3 (-40°C à 85°C) pour les systèmes non critiques. La plupart des capteurs MEMS automobiles sont certifiés Grade 1. Pour les applications ADAS ou ESC critiques pour la sécurité, vérifiez également la conformité à la sécurité fonctionnelle ISO 26262 (typiquement ASIL B ou C) au-delà de la qualification de base AEC-Q100.
Comment la température affecte-t-elle la précision des capteurs MEMS ?
La température influence les capteurs MEMS par plusieurs mécanismes : la dilatation thermique modifie les dimensions de la structure mécanique, affectant la sensibilité ; Les propriétés des matériaux dépendantes de la température modifient les caractéristiques électriques, créant des dérives décalées ; et la contrainte d’emballage varie avec la température. Spécifiez le budget total d’erreur incluant le coefficient de décalage de température (TCO) et le coefficient de sensibilité de température (TCS) sur toute votre plage de fonctionnement. Les MEMS de haute qualité incluent une compensation de température interne, mais des erreurs résiduelles de 0,01 %/°C (sensibilité) et 1 mg/°C ou 0,01°/s/°C (décalage) sont typiques même après compensation.
Les capteurs MEMS peuvent-ils survivre aux chocs mécaniques lors du transport et de la manipulation ?
La plupart des capteurs MEMS sont homologués pour des chocs mécaniques dans la plage de 3 000 à 10 000 g pendant une durée de <1 ms lorsqu’ils ne sont pas alimentés, ce qui couvre les scénarios de transport et de largage normaux. Cependant, l’alimentation motorisée réduit généralement la tolérance aux chocs à 1 500–2 000g car les circuits internes doivent rester fonctionnels. Suivez toujours les recommandations du fabricant pour les butées mécaniques et le montage afin d’éviter les dommages massifs à l’épreuve de la résistance. Pour les environnements de chocs extrêmes (collision automobile, applications militaires), spécifiez des dispositifs explicitement qualifiés pour la survie à haute gravité, et mettez en place un montage approprié sur circuit imprimé avec isolation des vibrations si nécessaire.
Qu’est-ce qui cause la dérive du gyroscope MEMS et comment puis-je la minimiser ?
La dérive du gyroscope MEMS (instabilité de polarisation) résulte de multiples sources : bruit électronique dans les circuits de lecture, bruit mécanique-thermique dans la structure résonante, et effets dépendants de la température dans le mécanisme de détection de Coriolis. Minimiser la dérive en : (1) maintenir une température de fonctionnement stable grâce à la gestion thermique, (2) implémenter une estimation de polarisation en temps d’exécution via des mises à jour zéro vitesse ou des périodes stationnaires, (3) fusionner les données du gyroscope avec les entrées de l’accéléromètre et du magnétomètre via un filtrage de Kalman, et (4) sélectionner des gyroscopes automobiles ou de qualité tactique avec une stabilité de polarisation de <5°/h pour des applications nécessitant un suivi d’angle précis. L’étalonnage d’usine à travers la température améliore encore les performances.
Existe-t-il des empreintes standards pour les capteurs MEMS afin de permettre la seconde source ?
Contrairement à certains composants passifs, les capteurs MEMS n’ont pas de repas réellement standardisés entre les fabricants. Cependant, des types d’emballages courants existent : des boîtiers LGA (land grid array) comme 3x3x1 mm ou 2,5x3x0,9 mm sont largement utilisés, et certains fournisseurs proposent des « brochages standards de l’industrie » conçus pour la compatibilité. Néanmoins, la seconde source nécessite généralement une refonte de circuits PCB ou des circuits adaptateurs, car même les boîtiers mécaniquement compatibles peuvent avoir des assignations de broches, des protocoles de communication ou des orientations d’axes de montage différentes. Concevez votre mise en page en tenant compte des variations potentielles d’empreinte, si la seconde source est cruciale.
Quels tests sont nécessaires pour valider la sélection du capteur MEMS pour mon application ?
Les tests de validation doivent inclure : (1) des tests fonctionnels sur toute la plage de températures de fonctionnement pour vérifier les spécifications de précision, (2) une mesure de la consommation d’énergie dans tous les modes de fonctionnement pour confirmer les calculs d’autonomie de la batterie, (3) des tests mécaniques de chocs et vibrations selon le profil environnemental de votre application, (4) des tests de compatibilité électromagnétique (EMC) pour s’assurer que les sorties des capteurs ne sont pas corrompues par le bruit du système, (5) une caractérisation à long terme de la dérive si la précision dans le temps est critique, et (6) vérification de l’alignement des axes pour s’assurer que le système de coordonnées des capteurs correspond à votre référentiel mécanique. Pour les systèmes critiques pour la sécurité, une validation fonctionnelle supplémentaire selon ISO 26262 ou IEC 61508 est requise.
8. Conclusion et prochaines étapes
La technologie MEMS a fondamentalement transformé l’intégration des capteurs dans les systèmes électroniques modernes, offrant des combinaisons sans précédent de petite taille, faible consommation d’énergie et rentabilité, permettant des innovations dans les domaines automobile, industriel, IoT et grand public. La réussite de la sélection MEMS nécessite d’équilibrer plusieurs paramètres techniques — sensibilité vs plage, puissance vs performance, précision vs coût – tout en tenant compte des exigences de stabilité de la chaîne d’approvisionnement et de qualification environnementale à long terme.
Lorsque vous choisissez des composants MEMS pour votre conception, priorisez ces éléments clés : d’abord, définissez clairement la plage de mesure, la précision et les exigences en bande passante de votre application afin d’éviter de surspécifier des capteurs hautes performances coûteux ou de sous-spécifier et nécessiter des redesigns coûteux. Deuxièmement, évaluez soigneusement les effets de la température et assurez-vous que la précision spécifiée inclut toute votre plage de température de fonctionnement. Troisièmement, planifiez la disposition de votre PCB et l’architecture de l’alimentation à l’avance pour minimiser le couplage bruyant et les contraintes mécaniques. Enfin, engagez les fournisseurs lors de la phase de conception pour assurer une disponibilité à long terme et comprendre les délais de livraison des volumes de production.
Pour les applications nécessitant une grande précision, une faible dérive ou un fonctionnement en environnement difficile, investissez dans des procédures d’étalonnage appropriées et des algorithmes de fusion de capteurs — ces approches logicielles offrent souvent de meilleures performances globales du système que de simplement choisir le dispositif MEMS de la plus haute qualité. Pour les systèmes automobiles ou critiques pour la sécurité, vérifiez à la fois la qualification AEC-Q et la conformité à la sécurité fonctionnelle (ISO 26262 ou équivalent) avant de finaliser votre conception.
Prochaines étapes recommandées :
- Télécharger des fiches techniques détaillées pour les capteurs MEMS candidats correspondant à vos exigences de candidature
- Demander des cartes d’évaluation ou des kits de développement pour valider les performances dans votre environnement système réel avant de s’engager dans des commandes à fort volume
- Consulter les ingénieurs des applications de terrain (FAE) de votre fournisseur pour des revues de conception, en particulier pour les projets d’intégration MEMS pour la première fois
- Utiliser des outils de sélection paramétrique en ligne des principaux fabricants pour filtrer rapidement les options par spécifications clés
- Si vous concevez pour des cycles de vie produits longs (>5 ans), établir une communication directe avec les fournisseurs MEMS concernant les feuilles de route des produits et la planification des fins de fin d’études
Le marché MEMS continue d’évoluer rapidement, avec des améliorations continues en termes de performance sonore, de consommation d’énergie et de densité d’intégration. Rester informé des nouvelles sorties d’appareils et des capacités de fabrication vous aidera à optimiser vos conceptions tant pour la production actuelle que pour les générations futures de produits.