

LiDAR mécanique vs LiDAR à semi-conducteurs : guide de sélection d’architecture, de performance et d’ingénierie
Le LiDAR (Light Detection and Ranging) est devenu une technologie fondamentale de détection pour les véhicules autonomes, la robotique, la cartographie géospatiale et les infrastructures intelligentes. En mesurant le temps nécessaire pour que les impulsions laser se réfléchissent sur les objets, les systèmes LiDAR génèrent des représentations tridimensionnelles de haute précision de l’environnement environnant.
Deux architectures principales dominent le marché : le LiDAR mécanique et le LiDAR à semi-conducteurs. Le LiDAR mécanique repose sur des assemblages optiques rotatifs pour réaliser un balayage grand angle, tandis que le LiDAR à semi-conducteurs élimine les pièces mobiles grâce aux technologies de direction par faisceau à semi-conducteurs.
Cet article examine l'architecture d’ingénierie, les principes de fonctionnement, les composants internes, les caractéristiques de performance et les applications concrètes des deux types de LiDAR. Il fournit également des critères de sélection pratiques pour les concepteurs de systèmes, aidant les ingénieurs à déterminer la solution LiDAR la plus adaptée en fonction de la portée, de la résolution, de la fiabilité et des exigences d’intégration.
Table des matières
- [1. Fondamentaux de la technologie LiDAR] (#1-fondamentaux-de-la technologie lidar)
- 2. Architecture LiDAR mécanique
- [3. Principe de fonctionnement du LiDAR mécanique (#3-principe-opérant-de-lidar-mécanique)
- [4. Composants principaux des systèmes LiDAR mécaniques] (#4-noyaux-composants-de-systèmes-lidar-mécaniques)
- 5. Architecture LiDAR à semi-conducteurs
- [6. Technologies de balayage LiDAR à semi-conducteurs] (#6-solid-state-lidar-scanning-technologies)
- [7. Composants principaux du LiDAR à semi-conducteurs (#7-noyau-composants-d’un lidar-semi-conducteur)
- [8. LiDAR mécanique vs semi-conducteur : comparaison d’ingénierie] (#8-mécanique-vs-solid-state-lidar-engineering-comparison)
- [9. Principales applications des systèmes LiDAR] (#9-principales-applications-de-systèmes-lidar)
- [10. Facteurs clés lors de la sélection d’un système LiDAR] (#10-facteurs-clés-lors de la sélection d’un système LIDAR)
- FAQ
- Conclusion
1. Fondamentaux de la technologie LiDAR
Le LiDAR (Light Detection and Ranging) est une technologie de détection optique active qui détermine la distance entre un capteur et un objet en mesurant le temps de vol (ToF) des impulsions laser.
Le processus de base de mesure comprend trois étapes :
- Émission laser – Une impulsion laser courte est transmise vers l’environnement.
- Réflexion – L’impulsion se reflète sur des objets tels que le terrain, les véhicules ou les structures.
- Détection – Un photodétecteur mesure le signal de retour et enregistre le temps de déplacement.
La distance est calculée en utilisant :
Distance = (c × t) / 2
Où :
- c = vitesse de la lumière
- t = temps aller-retour de l’impulsion laser
En répétant ce processus des millions de fois par seconde et en balayant dans plusieurs directions, les systèmes LiDAR génèrent des nuages de points 3D denses qui représentent l’environnement environnant.
2. Architecture LiDAR mécanique
LiDAR mécanique
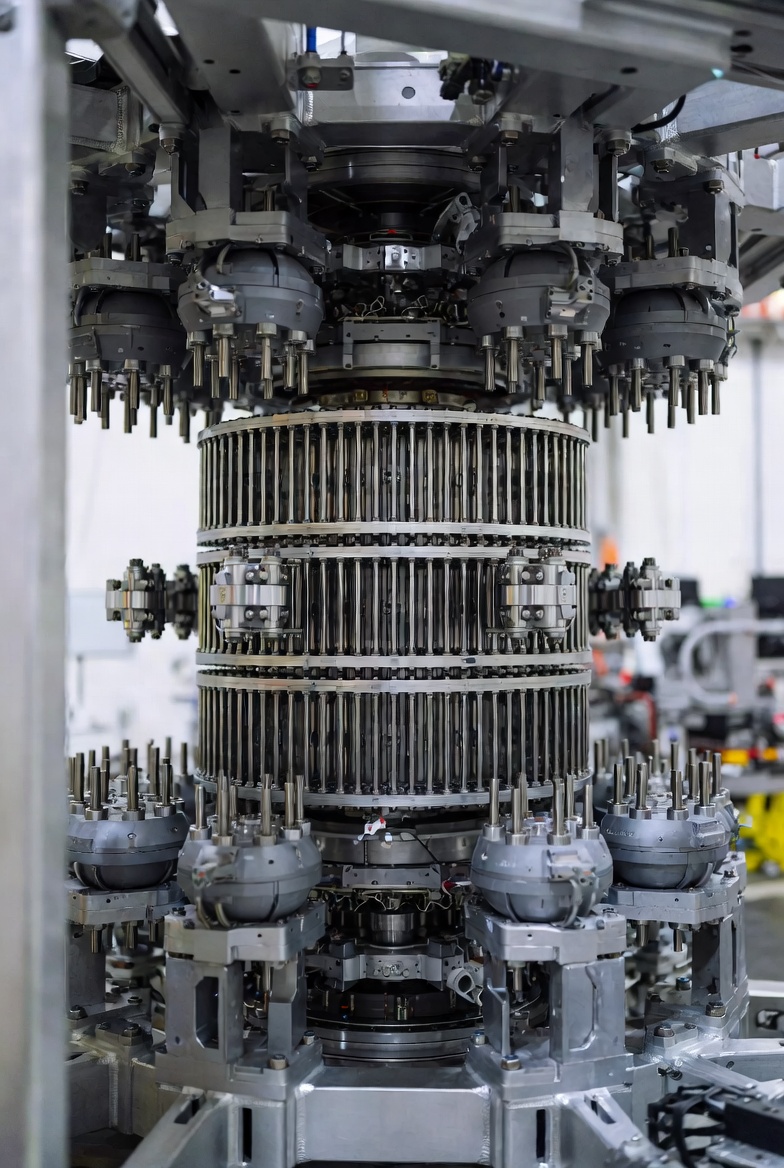
Figure 1. Architecture mécanique des capteurs rotatifs LiDAR
Le LiDAR mécanique est la première architecture LiDAR commercialement déployée. Il utilise des assemblages optiques rotatifs pour scanner l’environnement et collecter des mesures spatiales.
Les systèmes typiques consistent en une tête rotative contenant :
- émetteurs laser
- Photodétecteurs
- miroirs à balayage
- Objectifs optiques
L’ensemble de l’ensemble tourne à l’aide d’un moteur de précision, permettant au LiDAR d’atteindre un champ de vision horizontal de *360 degrés.
En raison de sa capacité à capturer des données grand angle et haute résolution, le LiDAR mécanique a historiquement été utilisé dans :
- Premiers prototypes de véhicules autonomes
- cartographie du terrain à haute résolution
- recherche en robotique
- systèmes de topographie
Cependant, la présence de pièces mobiles introduit des problèmes de complexité mécanique, de coût et de fiabilité.
3. Principe de fonctionnement du LiDAR mécanique
Processus mécanique de numérisation LiDAR
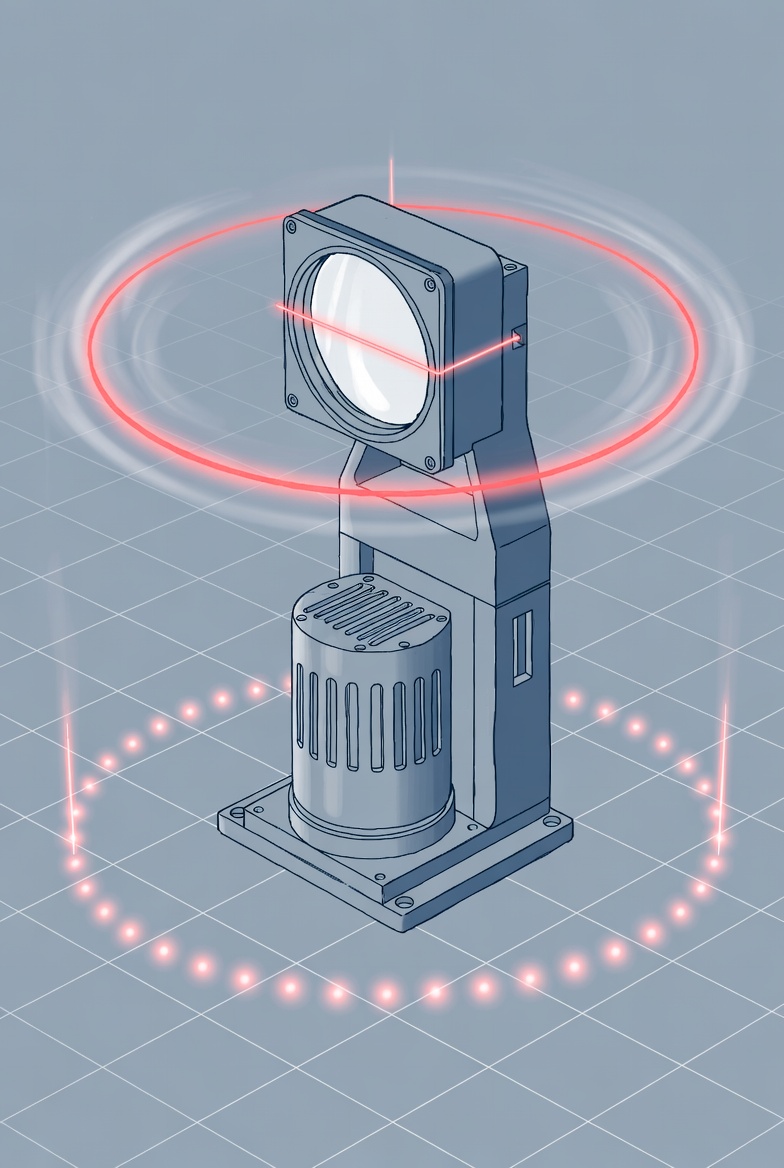
Figure 2. Principe de balayage mécanique LiDAR à 360 degrés
Les systèmes LiDAR mécaniques effectuent un balayage environnemental par rotation continue de l’ensemble capteur.
Le flux de travail typique comprend :
Balayage rotationnel
Un moteur à grande vitesse fait tourner la tête du capteur, souvent entre 5 et 20 tours par seconde.
Émission d’impulsions laser
Plusieurs lasers alignés verticalement émettent des impulsions pendant la rotation, créant un motif de balayage cylindrique.
Mesure du temps de vol
Les photodétecteurs mesurent le temps de retour des impulsions réfléchies pour déterminer la distance de l’objet.
Génération de nuages de points
Les mesures de distance sont combinées avec les données d’angle de rotation et d’orientation du capteur pour générer un nuage de points spatiaux 3D.
Les systèmes LiDAR mécaniques haut de gamme peuvent produire des millions de points par seconde, permettant une cartographie environnementale très détaillée.
4. Composants de base des systèmes LiDAR mécaniques
Un capteur LiDAR mécanique typique intègre plusieurs sous-systèmes critiques.
Émetteur laser
Produit des impulsions laser courtes, utilisant typiquement des lasers de 905 nm ou 1550 nm à longueur d’onde.
Récepteur photodétecteur
Détecte les photons réfléchis et convertit les signaux optiques en signaux électriques. Les types de détecteurs courants incluent :
- Photodiodes à avalanche (APD)
- Diodes d’avalanche à photon unique (SPAD)
Mécanisme de balayage rotationnel
Les moteurs et roulements mécaniques font pivoter l’ensemble optique pour assurer une couverture environnementale complète.
Unité de traitement du signal
Effectue l’amplification du signal, le filtrage et le calcul de distance à l’aide d’algorithmes ToF.
Capteurs de positionnement et de mouvement
Des systèmes tels que le GPS, l’IMU et les gyroscopes fournissent des données d’orientation pour aligner avec précision les mesures LiDAR en coordonnées globales.
5. Architecture LiDAR à semi-conducteurs
LiDAR à semi-conducteurs
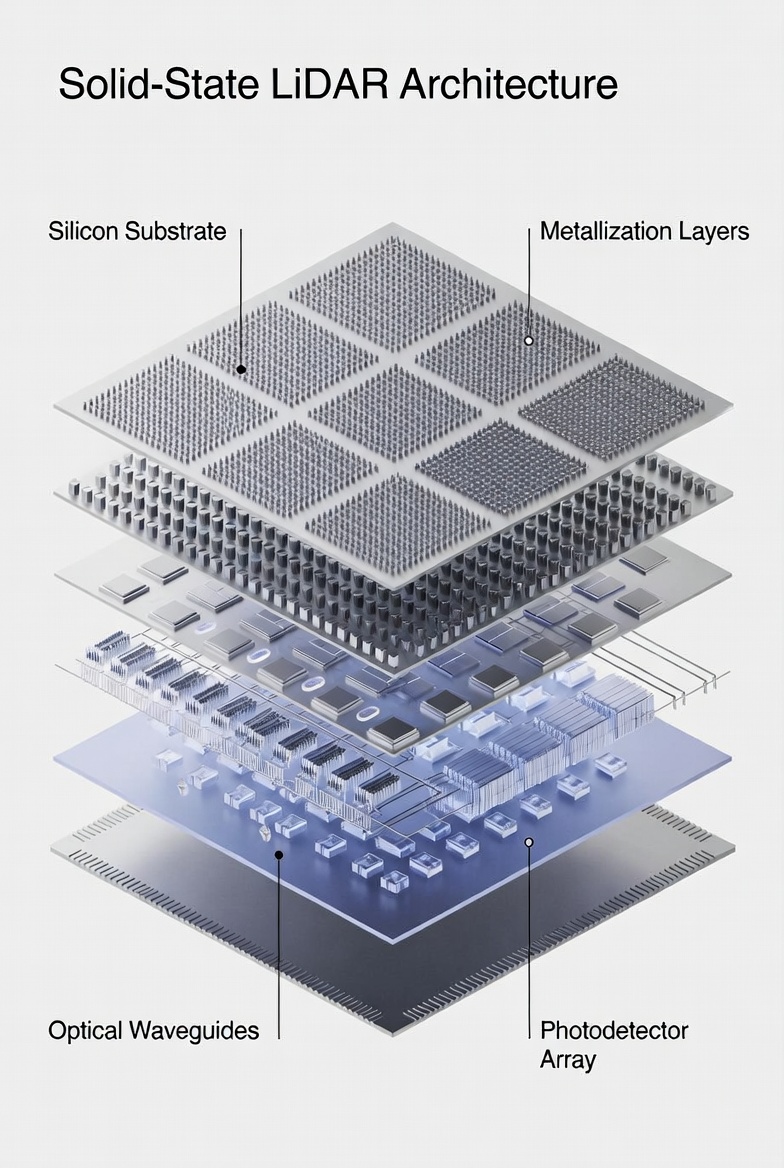
Figure 3. Architecture des semi-conducteurs LiDAR à semi-conducteurs à semi-conducteurs à semi-conducteurs
Le LiDAR à semi-conducteurs représente une nouvelle génération de capteurs LiDAR conçus sans rotation mécanique. À la place, la direction par faisceau est réalisée à l’aide de composants électroniques ou photoniques.
Les avantages incluent :
- taille physique plus petite
- une fiabilité supérieure
- consommation d’énergie plus faible
- meilleure évolutivité pour la production de masse
Le LiDAR à semi-conducteurs est devenu la solution privilégiée pour les systèmes de détection de qualité automobile et les plateformes de perception embarquées.
6. Technologies de balayage LiDAR à semi-conducteurs
Le LiDAR à semi-conducteurs peut être implémenté en utilisant plusieurs technologies de balayage différentes.
MEMS LiDAR
Utilise des miroirs micro-électromécaniques pour diriger les faisceaux laser. Ces miroirs oscillent à grande vitesse pour balayer le champ de vision.
Avantages :
- conception compacte
- coût modéré
- bonne résolution
Flash LiDAR
Éclaire toute la scène en une seule impulsion à l’aide d’un faisceau laser large et capture les reflets à l’aide d’un réseau de capteurs 2D.
Avantages :
- pas besoin de balayage
- taux de rafraîchissement extrêmement rapides
Limites :
- portée de détection plus courte
- besoins en puissance plus élevés
Réseau optique phasé (OPA)
Utilise un contrôle de phase photonique intégré pour diriger électroniquement les faisceaux laser sans pièces mobiles.
Avantages :
- conception entièrement à semi-conducteurs
- haute fiabilité
- intégration évolutive de puces
Cependant, la technologie OPA évolue encore et reste relativement coûteuse.
7. Composants principaux du LiDAR à semi-conducteurs
Le LiDAR à semi-conducteurs intègre plusieurs modules à base de semi-conducteurs.
Réseau d’émetteurs laser
Génère plusieurs faisceaux laser simultanément pour permettre un balayage à grande vitesse.
Réseau de photodétecteurs
Reçoit les photons réfléchis et les convertit en signaux électriques.
Module de direction à poutre
Implémentation de la numérisation à l’aide de miroirs MEMS, de photonique OPA ou de commutation électronique.
Électronique de traitement et de contrôle
Les processeurs embarqués accomplissent :
- amplification du signal
- filtrage du bruit
- calcul de distance
- reconstruction des nuages de points
Ces systèmes intègrent souvent des ASIC ou des processeurs FPGA pour le traitement des données en temps réel.
8. LiDAR mécanique vs semi-conducteur : comparaison de l’ingénierie
| Caractéristiques | LiDAR mécanique | LiDAR à semi-conducteurs |
|---|---|---|
| Méthode de balayage | Ensemble optique rotatif | Direction électronique ou photonique par faisceau |
| Pièces mobiles | Oui | Aucun ou minimal |
| Champ de vision | Jusqu’à 360° | Typiquement 90°–180° |
| Taille | Gros boîtier de capteur | Module semi-conducteur compact |
| Fiabilité | Usure mécanique possible | Fiabilité à long terme plus élevée |
| Fabrication | Assemblage mécanique complexe | Fabrication de semi-conducteurs évolutive |
| Tendance des coûts | Plus haut | Diminution avec la production de masse |
Le LiDAR mécanique offre généralement une résolution angulaire plus élevée et une couverture plus large, tandis que le LiDAR à semi-conducteurs offre une meilleure fiabilité et un meilleur potentiel d’intégration.
9. Principales applications des systèmes LiDAR
Scénarios d’application LiDAR
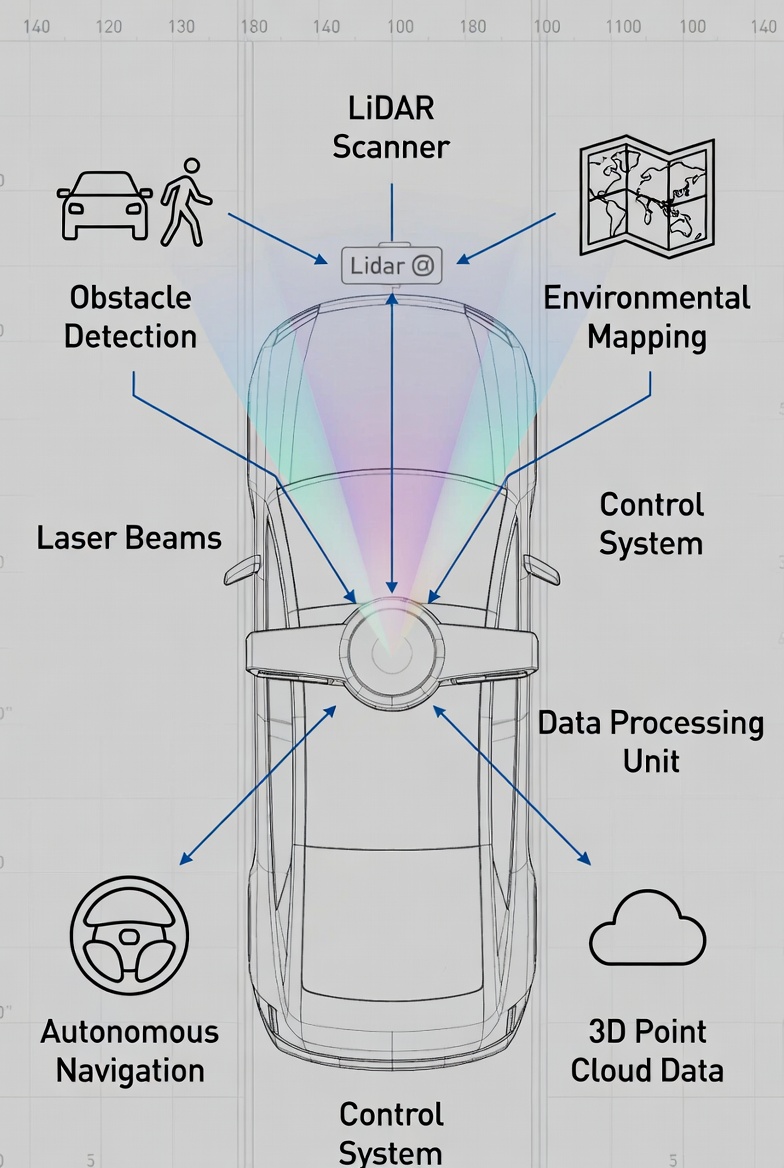
Figure 4. Applications LiDAR dans les systèmes autonomes
La technologie LiDAR est devenue essentielle dans plusieurs applications avancées de détection.
Véhicules autonomes
Le LiDAR permet aux véhicules de détecter des obstacles, d’identifier les limites routières et de construire des cartes 3D en temps réel de leur environnement.
Robotique et automatisation
Les robots industriels et mobiles utilisent le LiDAR pour la localisation et cartographie simultanées (SLAM).
Cartographie géospatiale
Les systèmes LiDAR embarqués génèrent des cartes topographiques haute résolution utilisées dans :
- modélisation du terrain
- planification des infrastructures
- analyse du risque d’inondation
Foresterie et surveillance environnementale
Le LiDAR pénètre les couches de végétation pour mesurer :
- structure de la canopée
- hauteur de l’arbre
- élévation du terrain sous les forêts
Villes intelligentes et infrastructures
Les urbanistes utilisent le LiDAR pour générer des modèles urbains 3D à haute précision pour la simulation et la planification.
10. Facteurs clés lors du choix d’un système LiDAR
Sélectionner le bon système LiDAR nécessite d’équilibrer les contraintes de performance, d’intégration et de coût.
Portée de détection
La distance détermine jusqu’où le capteur peut détecter de manière fiable les objets. Les systèmes de conduite autonome nécessitent généralement 150–300 mètres.
Résolution angulaire
Une résolution plus élevée entraîne des nuages de points plus denses et une meilleure reconnaissance des objets.
Champ de vision (FOV)
Un large champ de vision horizontal et vertical améliore la conscience environnementale.
Fréquence d’images
Une fréquence de balayage plus élevée permet une détection plus rapide des objets en mouvement.
Taille et intégration
Les capteurs compacts sont essentiels pour les drones, les robots et les systèmes embarqués.
Consommation d’énergie
Les conceptions à faible consommation sont essentielles pour les appareils mobiles et alimentés par batterie.
FAQ
Pourquoi les systèmes LiDAR à semi-conducteurs deviennent-ils de plus en plus populaires ?
Le LiDAR à semi-conducteurs élimine les pièces mécaniques, améliorant la fiabilité tout en permettant de réduire les coûts de fabrication grâce aux procédés de fabrication à semi-conducteurs.
Le LiDAR mécanique offre-t-il une meilleure précision ?
Le LiDAR mécanique offre souvent une résolution angulaire plus élevée et une couverture de balayage plus large, ce qui peut aboutir à des nuages de points plus détaillés.
Quelle longueur d’onde est couramment utilisée dans les systèmes LiDAR ?
La plupart des systèmes LiDAR fonctionnent à 905 nm ou 1550 nm en raison de la sécurité et des propriétés de transmission atmosphérique.
Le LiDAR peut-il fonctionner par mauvais temps ?
Les performances peuvent se dégrader en cas de fortes pluies, de brouillard ou de neige, car les particules en suspension diffusent la lumière laser et réduisent la puissance du signal.
Conclusion
Le LiDAR est devenu une technologie fondamentale de détection pour les systèmes autonomes modernes et les applications de cartographie spatiale. Le LiDAR mécanique offre un balayage à 360 degrés haute résolution et a historiquement été l’architecture dominante dans les plateformes de recherche et de cartographie. Cependant, l’essor des technologies basées sur les semi-conducteurs a accéléré l’adoption du LiDAR à semi-conducteurs en raison de sa taille compacte, de sa fiabilité et de sa scalabilité.
Pour les ingénieurs et les concepteurs de systèmes, choisir la solution LiDAR appropriée nécessite une prise en compte attentive de la plage, de la résolution, du champ de vision, de la consommation d’énergie et des contraintes d’intégration. À mesure que la photonique et la fabrication de semi-conducteurs continuent d’évoluer, le LiDAR à semi-conducteurs devrait jouer un rôle de plus en plus important dans les plateformes de détection de nouvelle génération.