

Technologie LiDAR expliquée : LiDAR à semi-conducteurs vs LiDAR mécanique
Le LiDAR (Light Detection and Ranging) est une technologie de détection qui mesure la distance à l’aide de la lumière laser et génère des représentations 3D précises de l’environnement environnant. Il est largement utilisé dans les véhicules autonomes, la robotique, les drones, l’automatisation industrielle et les systèmes de cartographie.
Les systèmes LiDAR modernes se divisent en deux grandes catégories : le LiDAR mécanique et le LiDAR à semi-conducteurs. Le LiDAR mécanique repose sur des assemblages optiques rotatifs pour balayer l’environnement, tandis que le LiDAR à semi-conducteurs utilise des balayages électroniques à semi-conducteurs sans pièces mobiles.
Cet article explique les principes d’ingénierie, l’architecture et les caractéristiques de performance des capteurs LiDAR et propose une comparaison technique entre les technologies LiDAR à semi-conducteurs et mécaniques. Il explore également des applications concrètes et des considérations de sélection pour les ingénieurs et les concepteurs de systèmes.
Table des matières
- Qu’est-ce que le LiDAR
- [Architecture centrale des systèmes LiDAR] (#core-architecture-de-systèmes lidar)
- [LiDAR à semi-conducteurs] (LIDAR à #solid-état)
- [Principe de fonctionnement du LiDAR à semi-conducteurs] (#working-principe du lidar-semi-conducteur)
- [Exemple : LiDAR à courte portée à réseau linéaire] (#example-linéaire-array-short-range-lidar)
- [LiDAR mécanique] (#mechanical-lidar)
- [Principe de fonctionnement du LiDAR mécanique] (#working-principe du lidar-mécanique)
- [Exemple : capteur RPLIDAR A3 à 360°] (#example-rplidar-a3-360-sensor)
- [LiDAR à semi-conducteurs vs LiDAR mécanique] (Lidar-état-#solid-vs-lidar-mécanique)
- [Principales applications du LiDAR] (#major-applications-de-lidar)
- [Comment choisir la bonne technologie LiDAR] (#how-to-choose-the-right-lidar-technology)
- FAQ
- Conclusion
Qu’est-ce que le LiDAR
LiDAR signifie Light Detection and Ranging, une méthode de télédétection qui mesure les distances en émettant des impulsions laser et en mesurant le temps nécessaire pour que la lumière réfléchie retourne au capteur.
Le principe de base de la mesure est Temps de vol (ToF) :
- L’émetteur LiDAR envoie une impulsion laser vers un objet.
- L’impulsion se reflète sur la surface de l’objet.
- Le récepteur détecte le signal réfléchi.
- Le système calcule le temps aller-retour de la lumière.
Comme la lumière voyage à une vitesse constante, la distance peut être calculée avec précision.
Équation de distance :
Distance = (c × t) / 2
Où :
- c = vitesse de la lumière
- t = temps entre l’émission et la détection
En répétant ce processus des milliers ou des millions de fois par seconde dans plusieurs directions, le système LiDAR génère un nuage de points, qui est une représentation spatiale 3D de l’environnement.
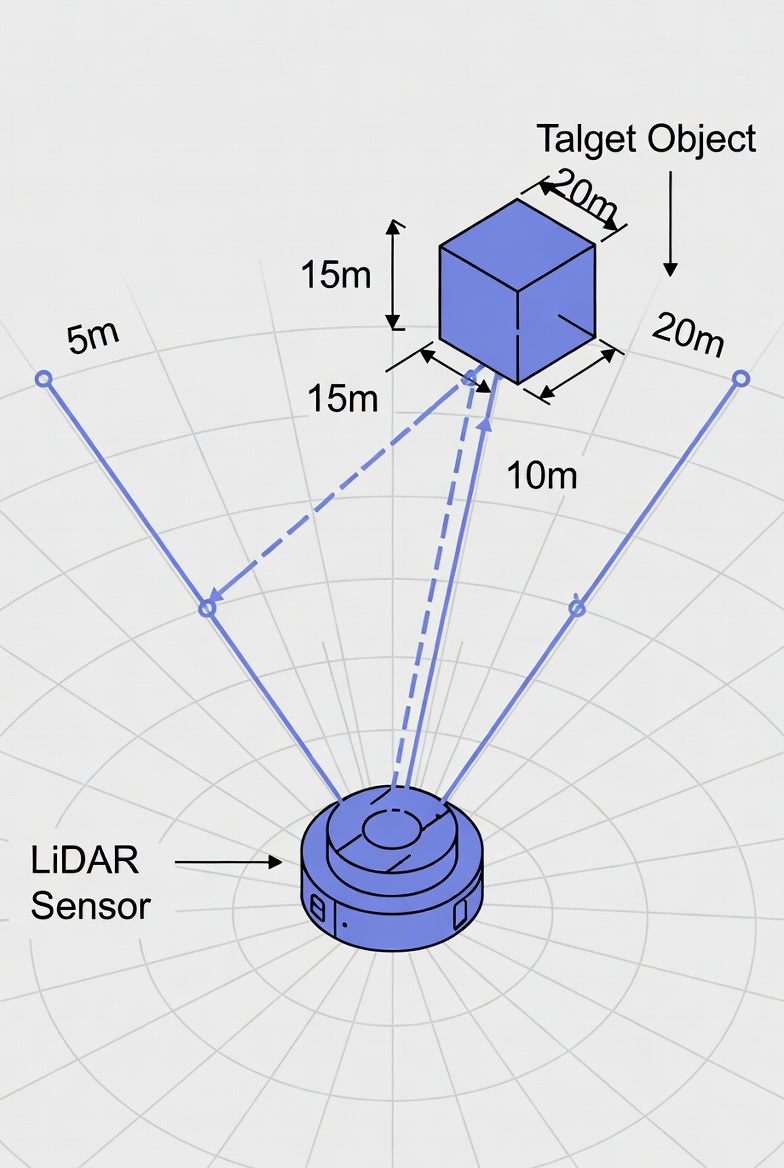
Figure 1. Mesure de distance LiDAR et génération de nuages de points 3D
Architecture centrale des systèmes LiDAR
Un capteur LiDAR typique comprend plusieurs sous-systèmes majeurs.
Émetteur laser
L’émetteur produit de courtes impulsions de lumière laser cohérente.
Les longueurs d’onde courantes incluent :
- 850 nm
- 905 nm
- 1550 nm
Le choix de la longueur d’onde influence la portée, la sécurité des yeux et l’absorption atmosphérique.
Système de balayage optique
Ce sous-système dirige le faisceau laser dans différentes directions de l’espace.
Deux approches principales existent :
- Balayage mécanique
- Balayage électronique (à semi-conducteurs)
Récepteur photodétecteur
Le récepteur détecte le signal laser réfléchi. Les détecteurs typiques incluent :
- APD (photodiodes à avalanche)
- SPAD (Diodes à avalanche à photon unique)
Ces détecteurs sont extrêmement sensibles et peuvent détecter des signaux réfléchis très faibles.
Unité de traitement du signal
Le processeur de signal effectue :
- Mesure du temps de vol
- Calcul de distance
- Filtrage du bruit
- Génération de nuages de points
Les systèmes LiDAR modernes intègrent souvent des processeurs FPGA ou ASIC pour un traitement de données à haute vitesse.
LiDAR à semi-conducteurs
Le LiDAR à semi-conducteurs est une architecture LiDAR qui élimine la rotation mécanique et repose sur des technologies de balayage basées sur des semi-conducteurs.
Cette approche améliore considérablement la fiabilité, la taille et la fabricabilité, la rendant adaptée à la production automobile à grande volée.
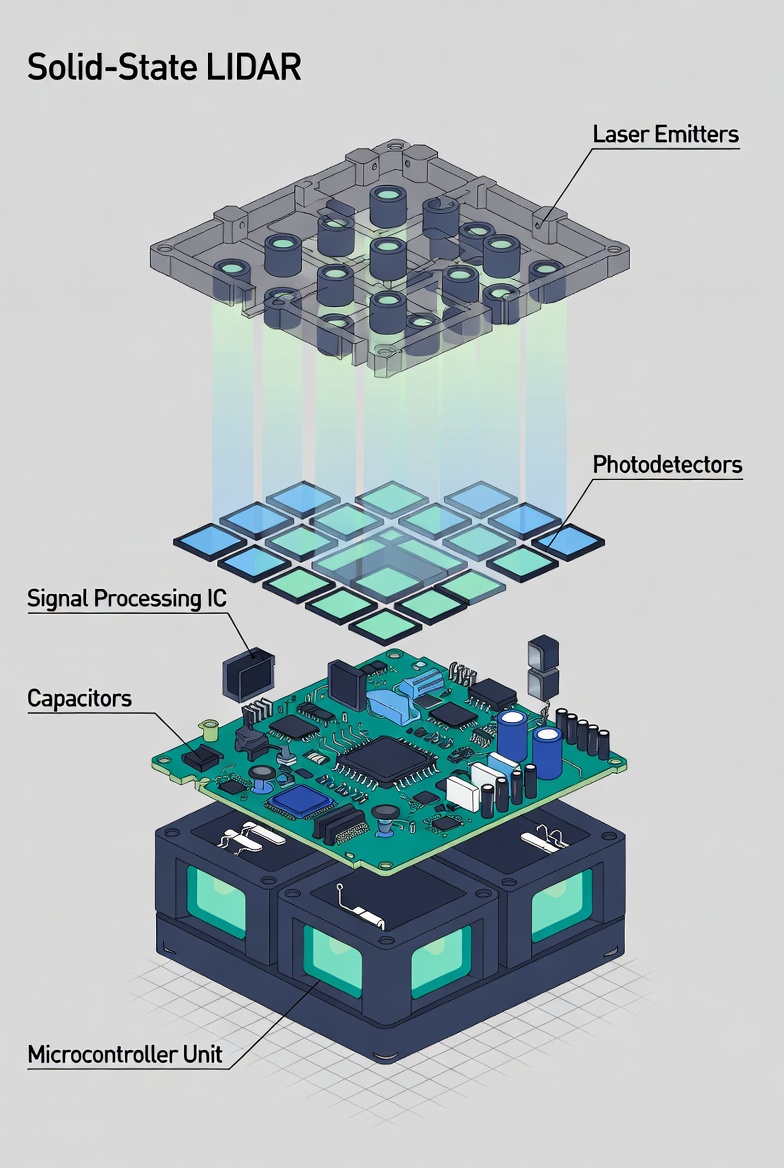
Figure 2. Structure interne LiDAR à semi-conducteurs
Principe de fonctionnement du LiDAR à semi-conducteurs
Au lieu d’optiques rotatives, le LiDAR à semi-conducteurs utilise des technologies électroniques de guidage par faisceau telles que :
- Miroirs MEMS
- Réseaux optiques à phase
- Réseaux LiDAR Flash
MEMS LiDAR
Utilise des miroirs micro-électromécaniques pour diriger le faisceau laser.
Avantages :
- Taille compacte
- Coût modéré
- Bonne résolution de balayage
Flash LiDAR
Émets une large impulsion laser qui illumine toute une scène d’un coup.
Avantages :
- Aucun mécanisme de balayage
- Fréquence d’images très rapide
LiDAR à réseau optique phasé
Utilise le contrôle de phase par semi-conducteur pour diriger électroniquement le faisceau laser.
Avantages :
- Entièrement à semi-conducteurs
- Extrêmement compact
Exemple : LiDAR à courte portée à réseau linéaire
Un *LiDAR à semi-conducteurs courte portée typique est utilisé pour la détection d’obstacles en robotique et en automatisation industrielle.
Exemples de caractéristiques de performance
| Paramètre | Valeur typique |
|---|---|
| Tension de fonctionnement | 5,1 V |
| Consommation actuelle | 0,136 A |
| Consommation d’énergie | ~0,7 W |
| Portée de détection | 25 mm – 300 mm |
| Champ de vision | ~109° |
| Résolution angulaire | ~0,7° |
| Précision en intérieur | 1–3 mm |
Ces capteurs sont couramment intégrés dans :
- robots d’entrepôt
- appareils électroménagers intelligents
- équipements d’automatisation industrielle
- systèmes de détection d’obstacles
LiDAR mécanique
Le LiDAR mécanique est l'architecture LiDAR traditionnelle utilisée dans les premiers prototypes de robotique et de véhicules autonomes.
Ces capteurs utilisent des assemblages optiques rotatifs pour scanner l’environnement.
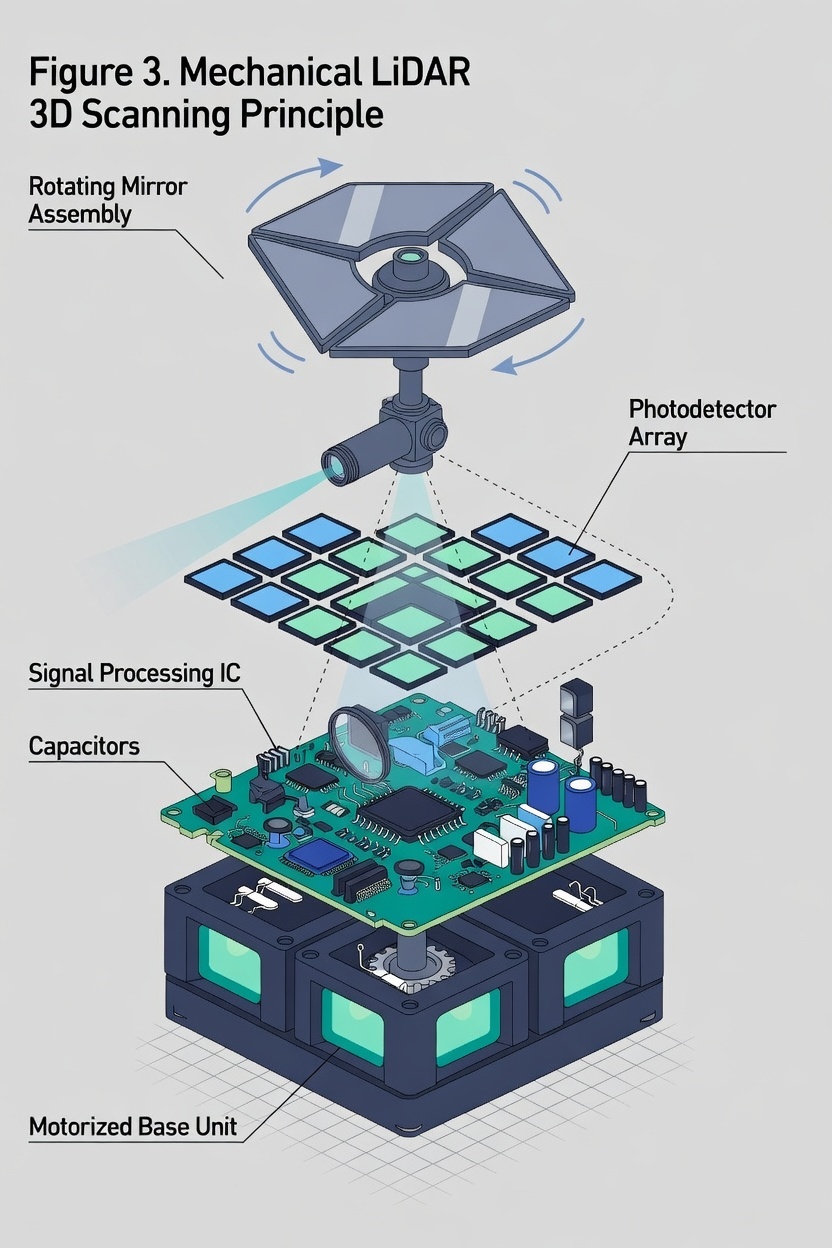
Figure 3. Principe de balayage mécanique LiDAR 3D
Principe de fonctionnement du LiDAR mécanique
Les capteurs LiDAR mécaniques utilisent un mécanisme rotatif actionné par un moteur.
Le processus de numérisation fonctionne comme suit :
- Un émetteur laser génère des impulsions.
- L’ensemble de balayage tourne.
- Les impulsions laser balayent l’environnement.
- Les signaux réfléchis sont détectés par le récepteur.
- Les données de distance sont enregistrées pour chaque angle.
Parce que le capteur tourne continuellement, il peut réaliser un balayage environnemental à 360°.
Cette conception produit des nuages de points 3D extrêmement denses et précis.
Exemple : capteur RPLIDAR A3 360°
Le RPLIDAR A3 est largement utilisé dans les systèmes de navigation robotique.
Caractéristiques électriques
| Paramètre | Valeur |
|---|---|
| Tension de fonctionnement | 5,1 V |
| Courant de fonctionnement | 0,3736 A |
| Consommation d’énergie | ~1,9 W |
Performance de mesure
| Caractéristiques | Valeur |
|---|---|
| Plage de mesure | 5 cm – 18 m |
| Couverture de la numérisation | 360° |
| Résolution angulaire | ~0,225° |
| Zone aveugle | ~0,2 m |
Les capteurs LiDAR mécaniques sont couramment utilisés dans :
- Robotique SLAM
- navigation intérieure
- Équipements de cartographie
- plateformes de recherche
LiDAR à semi-conducteurs vs LiDAR mécanique
| Caractéristiques | LiDAR à semi-conducteurs | LiDAR mécanique |
|---|---|---|
| Méthode de balayage | Direction électronique par faisceau | Rotation entraînée par un moteur |
| Pièces mobiles | Aucun | Composantes rotatives |
| Taille | Compact | Plus grand |
| Fiabilité | Haut | Usure mécanique possible |
| Couverture de la numérisation | Typiquement limité | Possible à 360° complet |
| Consommation d’énergie | Lower | Plus haut |
| Coût (production de masse) | Lower | Plus haut |
Ces dernières années, les constructeurs automobiles se tournent rapidement vers le LiDAR à semi-conducteurs en raison des avantages de fiabilité et de scalabilité.
Principales applications du LiDAR
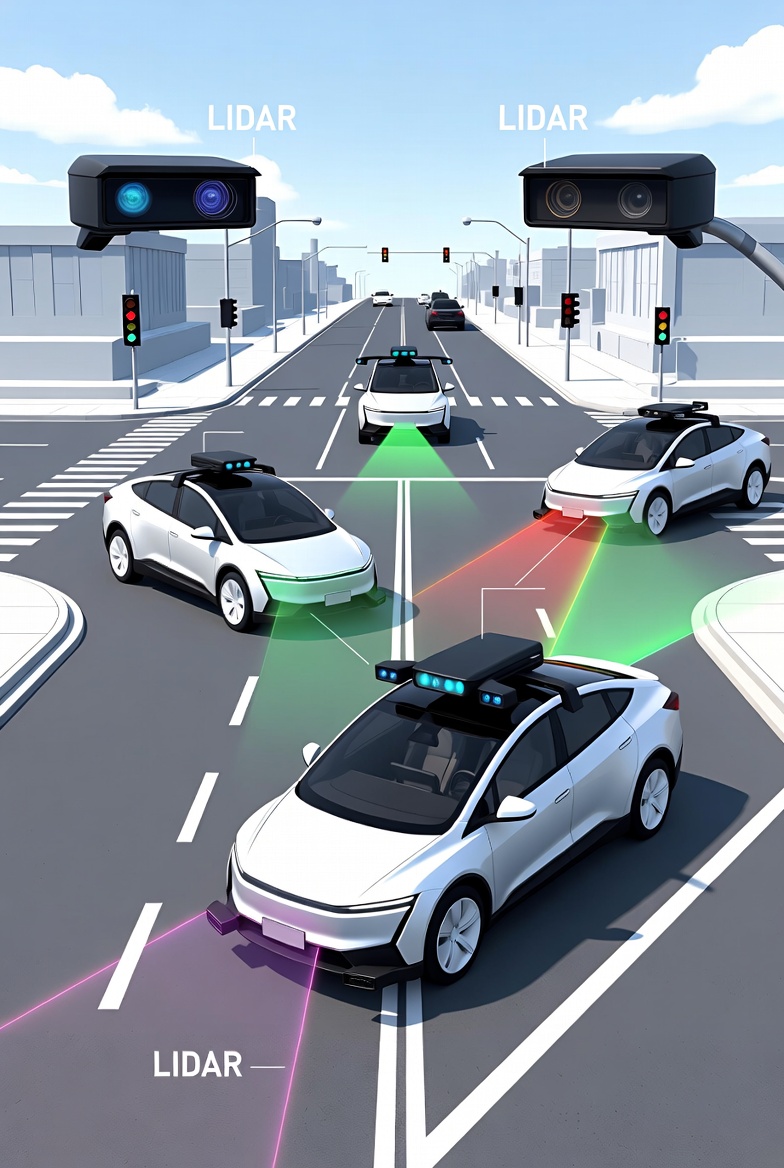
Figure 4. Applications LiDAR dans les véhicules autonomes
Véhicules autonomes
Le LiDAR offre une perception 3D haute résolution pour :
- détection d’obstacles
- détection de voie
- reconnaissance des piétons
Robotique et SLAM
Les robots utilisent le LiDAR pour construire des cartes et naviguer dans les environnements en utilisant des algorithmes de localisation et cartographie simultanées (SLAM).
Cartographie et relevé aérien
Le LiDAR monté sur des drones peut créer des cartes topographiques et des modèles de terrain très précis.
Villes intelligentes
Les capteurs LiDAR aident à surveiller :
- flux de trafic
- Conditions des infrastructures
- Données d’urbanisme
Automatisation industrielle
Les usines utilisent le LiDAR pour :
- détection d’objets
- navigation d’entrepôt
- systèmes de sécurité automatisés
Comment choisir la bonne technologie LiDAR
Les ingénieurs évaluent généralement plusieurs facteurs lors du choix d’un capteur LiDAR.
Couverture en balayage
Les applications nécessitant une pleine conscience environnementale (par exemple, les robots cartographiques) nécessitent souvent un balayage à 360°, privilégiant le LiDAR mécanique.
Taille du système
Les systèmes embarqués ou dispositifs compacts bénéficient du LiDAR à semi-conducteurs grâce à des formats plus petits.
Fiabilité
Les capteurs à semi-conducteurs offrent une meilleure fiabilité car ils éliminent l’usure mécanique.
Consommation d’énergie
Les systèmes alimentés par batterie préfèrent généralement le LiDAR à semi-conducteurs.
Coût en production de masse
Les applications automobiles exigent des capteurs évolutifs à faible coût, faisant du LiDAR à semi-conducteurs la solution privilégiée.
FAQ
Quel est le principal avantage du LiDAR à semi-conducteurs ?
Le LiDAR à semi-conducteurs ne possède aucune pièce mobile, ce qui améliore la durabilité, réduit la taille et permet une fabrication à grande échelle de semi-conducteurs.
Pourquoi le LiDAR mécanique atteindrait-il un balayage à 360° ?
Le LiDAR mécanique utilise des assemblages optiques rotatifs entraînés par des moteurs, permettant au faisceau laser de balayer tout l’environnement.
Quel LiDAR est le meilleur pour les véhicules autonomes ?
La plupart des plateformes de véhicules autonomes de nouvelle génération préfèrent le LiDAR à semi-conducteurs car il offre une fiabilité supérieure, des tailles plus petites et un coût de production de masse moindre.
Qu’est-ce qui limite les performances du LiDAR ?
Les principaux facteurs limitants incluent :
- Conditions atmosphériques
- réflectivité de surface
- Interférence solaire
- résolution du capteur
Conclusion
Le LiDAR est une technologie de détection essentielle pour les systèmes intelligents modernes. Grâce à la mesure de distance au laser, le LiDAR permet aux machines de percevoir et de cartographier l’environnement environnant avec une grande précision.
Le LiDAR mécanique offre un balayage grand angle et des performances matures, tandis que le LiDAR à semi-conducteurs offre une taille compacte, une fiabilité améliorée et une fabrication évolutive.
À mesure que les technologies semi-conductrices et photoniques continuent d’évoluer, le LiDAR à semi-conducteurs devrait devenir l’architecture dominante pour les futures applications en conduite autonome, robotique et infrastructures intelligentes.