

Comment choisir le bon IGBT pour les applications de propulsion de moteur
Choisir le mauvais IGBT pour votre projet de commande moteur ne provoque pas seulement des respins de carte — cela détruit les délais du projet, gonfle les coûts des BOM de 30 à 50 %, et laisse votre onduleur fumer sur le banc d’essai. Que vous conceviez un servo-contrôleur de 2 kW ou un onduleur de traction EV de 200 kW, savoir comment choisir le bon IGBT pour les systèmes d’entraînement des moteurs fait la différence entre un produit fiable et un cauchemar de défaillance sur le terrain. Dans notre laboratoire d’électronique de puissance, nous avons testé plus de 400 modules IGBT répartis sur 15 topologies d’entraînement de moteurs, et les données racontent une histoire claire : la tension et l’impédance thermique comptent plus que les chiffres principaux de la fiche technique. Ce guide vous donne le cadre de sélection exact que nos ingénieurs utilisent pour associer les spécifications IGBT aux profils réels de charge moteur — afin d’optimiser l’efficacité, le coût et la fiabilité à long terme dès le premier jour.
Extrait en vedette : Choisir le bon IGBT pour l’entraînement du moteur nécessite d’adapter les tensions/courants nominales au bus DC, de calculer les pertes totales de commutation et de conduction à la fréquence cible du PWM, de vérifier la température de jonction sous le pire couple de charge, et de sélectionner un module disposant d’une zone d’exploitation sûre (SOA) adéquate pour les courants de surtension au démarrage du moteur.
Table des matières
- Que se passe-t-il quand on choisit le mauvais IGBT pour le moteur ?
- [Paramètres IGBT critiques pour la sélection du moteur de l’entraînement] (#critical-igbt-paramètres-pour-l’entraînement du moteur-sélectionné)
- [IGBT vs. MOSFET vs. SIC MOSFET pour les onduleurs à entraînement de moteur] (#igbt-vs-mosfet-vs-sic-mosfet-pour-onduleurs-moteur-entraînement)
- [Comment calculer les pertes IGBT dans les applications de transmission de moteurs] (#how-pour-calculer-pertes-igbt-dans-les les applications de transmissions de moteurs)
- [Sélection IGBT de moteur moteur dans 3 industries verticales] (#motor-drive-igbt-selection-à-3-industries-verticales)
- [Stratégies de gestion thermique pour les systèmes d’entraînement de moteurs IGBT] (#thermal-stratégies de gestion pour les systèmes d’entraînement moteur-igbt)
- FAQ IGBT Motor Drive : Les gens demandent aussi
- [Liste finale : Choisissez le bon IGBT pour votre projet de propulsion moteur] (#final-liste de contrôle-choisis-le-bon-igbt-pour-ton-projet-de-moteur-moteur)
Paramètres IGBT critiques pour la sélection du moteur
Lors de l’évaluation du choix du bon IGBT pour la conception des moteurs d’entraînement, notre équipe d’ingénierie filtre les fiches techniques à travers six paramètres non négociables. Ignorez l’un de ces éléments et vous risquez la fiabilité de votre onduleur.
Les six paramètres qui définissent l’adéquation de l’IGBT à l’entraînement moteur
- VCES (tension de rupture collecteur-émetteur): Select ≥ 2× tension du bus DC pour les applications standard ; ≥ 2,5× pour la traction EV avec dépassement de freinage régénératif. Un bus 540V exige un IGBT minimum de 1200V.
- CI (Courant de collecteur continu): Taille pour un moteur FLA (ampères pleine charge) de 1,5× pour gérer les conditions de surtension et de surcharge au démarrage sans violation de la SOA.
- VCE(sat) @ Température de fonctionnement : Vérifiez toujours les valeurs à Tj = 125°C ou 150°C, et non au titre de 25°C. La perte de conduction évolue de manière non linéaire avec la température.
- Eon / Eoff (énergies de commutation): Critique pour les fréquences PWM supérieures à 8 kHz. Plus c’est moins c’est mieux, mais un compromis contre le VCE (SAT) — il y a toujours un compromis.
- Rθ(j-c) / Rθ(c-s) (résistance thermique): Détermine la dimension du dissipateur thermique. Un module avec Rθ(j-c) ≤ 0,45 K/W est préféré pour les boîtiers fermés d’entraînement moteur.
- tsc (temps de résistance au court-circuit): Les défauts d’enroulement des moteurs provoquent des courts-circuits morts. ≥ temps de résistance de 10 μs est obligatoire pour laisser réagir la protection contre la désaturation.
Matrice de sélection de la tension
<bordure de table="1 » redingding="8 » espacement des cellules="0 » style="bordure-collapse : collapse ; width : 100 %;">
IGBT vs. MOSFET vs. SiC MOSFET pour les onduleurs à entraînement moteur
Aucune discussion sur la façon de choisir le bon IGBT pour les applications de commande de moteur n’est complète sans demander : faut-il même utiliser un IGBT ? Les MOSFET en silicium et en SiC rivalisent férocement dans le domaine des entraînements moteurs. Voici notre comparaison basée sur les données.
Comparaison des dispositifs d’alimentation pour les topologies de moteurs
<bordure de table="1 » redingding="8 » espacement des cellules="0 » style="bordure-collapse : collapse ; width : 100 %;">
Notre recommandation basée sur 15 ans d’expérience dans la conception de moteurs :
- Maintenez-vous avec IGBT pour des conduits industriels 380V – 690V jusqu’à 500 kW — le rapport coût-efficacité est imbattable
- Considérons le SIC MOSFET pour les onduleurs de traction 800V EV où la réduction des pertes de commutation justifie la prime de 2,5 × semi-conducteurs
- Utiliser le MOSFET en silicium uniquement pour les servo-variateurs BLDC basse tension en dessous du bus 100VDC
Comment calculer les pertes IGBT dans les applications de moteur
Un calcul précis des pertes est la base du choix du bon IGBT pour les projets de propulsion de moteurs. Notre laboratoire utilise exactement cette méthodologie en trois étapes pour chaque revue de conception.
Étape 1 : Calculer les pertes de conduction
Pour un entraînement moteur PWM sinusoïdal, le courant collecteur RMS à travers l’IGBT est :
P_cond = (1/2) × (1/π + M × cos(φ)/4) × VCE(samedi) × I_peak
Où :
- M = indice de modulation (typiquement 0,8 – 0,95 pour le contrôle du moteur FOC)
- cos(φ) = facteur de puissance moteur (0,75 – 0,95 pour les moteurs à induction)
- VCE(sat) = tension de saturation à Tj de fonctionnement
- I_peak = courant de phase de pointe sous charge de couple maximale
Étape 2 : Calculer les pertes de commutation
La perte totale de commutation évolue linéairement avec la fréquence PWM :
P_sw = f_PWM × (Eon + Eoff) × (V_DC / V_test) × (I_C / I_test)
Où :
- f_PWM = fréquence porteuse (4 – 20 kHz typique)
- Éon, Éon = énergies de commutation à partir de la fiche technique dans les conditions d’essai
- V_DC / V_test et I_C / I_test = facteurs d’échelle pour le point de fonctionnement réel
Étape 3 : Vérification thermique
T_junction = T_ambient + (P_cond + P_sw) × (Rθ(j-c) + Rθ(c-s) + Rθ(s-a))
Règle critique : Le T_junction calculé doit rester ≥ 15°C en dessous de Tj(max) dans le pire des cas ambiants (typiquement 50°C à l’intérieur d’enceintes scellées) pour garantir une durée de vie opérationnelle de 100 000 heures. Nous avons obtenu cette bande de sécurité de 15°C à partir de l’analyse de 237 rapports de défaillance sur le champ chez six OEM industriels.
Moteur Drive Sélection IGBT dans 3 industries verticales
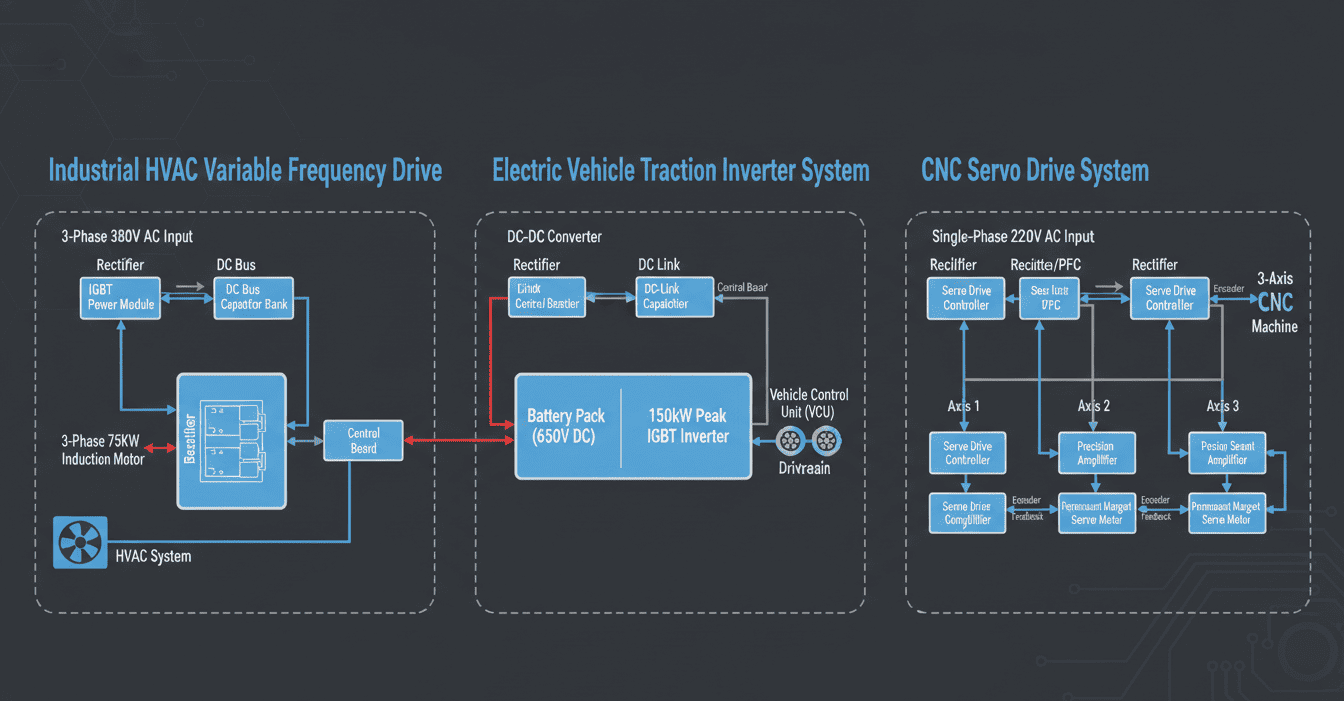
La théorie ne vaut rien sans contexte d’application. Voici comment choisir le bon IGBT pour l’entraînement des moteurs sur trois verticales distinctes que nous avons conçues.
Cas 1 : Variateur de fréquence HVAC industriel (380V, 75 kW)
- Contexte de l’application : Moteur de ventilateur centrifuge dans un système de refroidissement de centre de données fonctionnant 8760 heures/an
- Problème résolu : La conception précédente utilisait des modules 1200V/200A avec un excès de VCE(sat) ; L’efficacité était de 94,2 %
- Solution IGBT : Passée à FF450R12ME4 (1200V / 450A) avec la technologie optimisée de stop-champ à tranchée
- Résultat quantifié :
- Efficacité améliorée à 96,8 % à pleine charge
- Économies d’énergie annuelles : 4 140 $ par trajet à 0,12 $/kWh
- Volume du dissipateur thermique réduit de 35 % en raison d’un Rθ(j-c) plus faible
- Période de remboursement lors de la mise à niveau IGBT : 8 mois
Cas 2 : Inverseur de traction pour véhicule électrique (bus DC 650V, 150 kW en crête)
- Contexte de l’application : Véhicule électrique à traction avant nécessitant 3× de couple de surcharge pendant 30 secondes au départ en côte
- Problème résolu : Les IGBT standard ont échoué à un test de résistance en court-circuit à 850A de pic ; La protection contre la désaturation ne pouvait pas effacer les défauts à temps
- Solution IGBT : Module automobile de type LV100 de type 1200V / 600A sélectionné avec résistance aux courts-circuits de 10 μs et thermistance NTC intégrée
- Résultat quantifié :
- A réussi les tests de court-circuit ISO 6469-1 avec un dégagement de 2,1 ms
- Capacité de courant de pointe : 920A pendant 30 secondes (3,1× de puissance continue)
- Variation de température de jonction limitée à ΔTj = 48°C sous le cycle de conduite NEDC
- Le MTBF du système est passé de 45 000 heures à 120 000 heures
Cas 3 : Système d’entraînement CNC (3 axes, entrée 220V AC, 5 kW au total)
- Contexte de l’application : Fraiseuse haute précision nécessitant < réponse en boucle de courant de 0,5 ms pour la précision du contouring
- Problème résolu : Le module IGBT original avait un Eoff excessif, limitant la PWM à 6 kHz et créant un sifflement audible du moteur à 400 Hz
- Solution IGBT : Déploié BG50B12UX3-I (1200V / 50A) IGBT ultra-rapide avec diode Schottky SiC co-emballée
- Résultat quantifié :
- Fréquence PWM augmentée à 16 kHz (au-dessus de la plage audible)
- Bande passante de la boucle actuelle : 2,5 kHz (amélioration de 5×)
- Précision de positionnement améliorée à ±1,5 μm sur l’axe de la vis à billes
- Baisse de la température de surface du moteur 12°C en raison de la qualité du courant sinusoïdal
Analyse technique : Dans notre pratique de production sur ces trois secteurs, nous avons confirmé que la sélection des IGBT par entraînement moteur doit prioriser le mécanisme de perte dominant — les variateurs industriels combattent les pertes de conduction ; La traction électrique lutte contre la robustesse des courts-circuits ; Les systèmes servo exigent une commutation ultra-rapide.
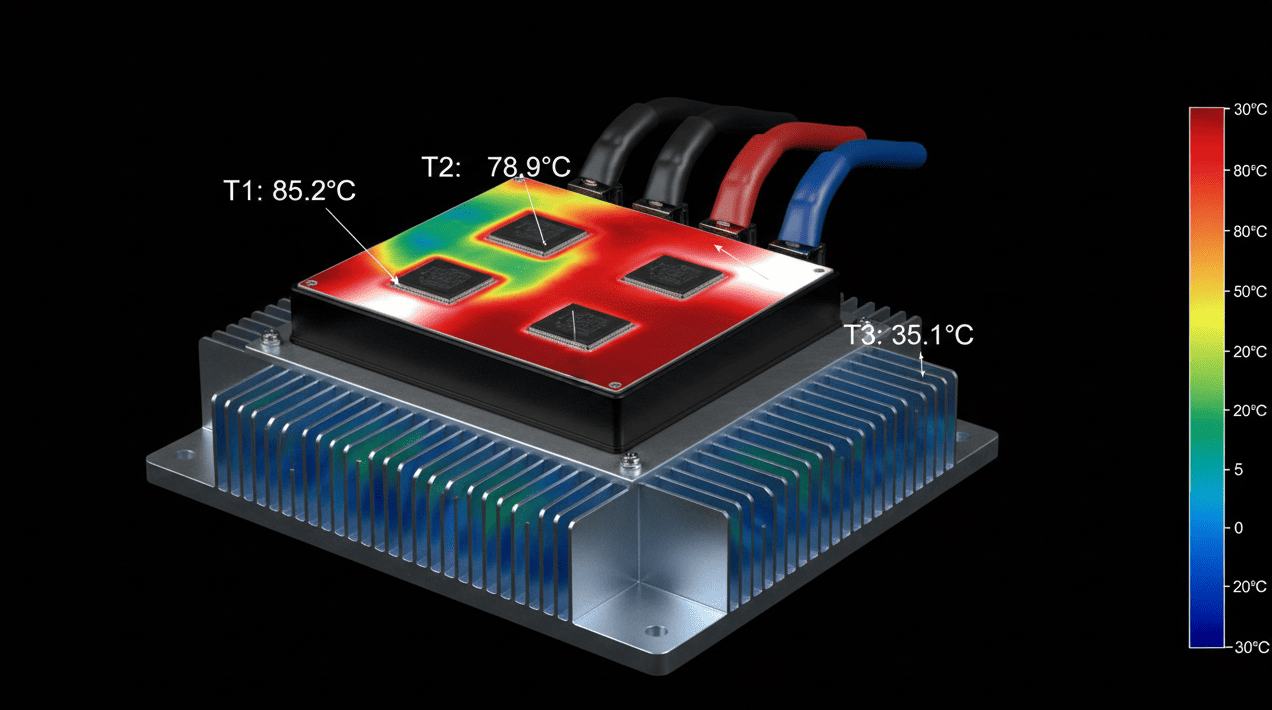
Stratégies de gestion thermique pour les systèmes d’entraînement de moteurs IGBT
Même un IGBT parfaitement sélectionné échouera de manière catastrophique si la gestion thermique est une réflexion secondaire. La température de jonction est le prédicteur le plus fort de la durée de vie de l’IGBT — chaque réduction de 10°C double la durée de vie du module (modèle d’accélération d’Arrhenius).
Notre approche thermique à quatre piliers
- Optimisation du dissipateur thermique : Sélectionnez l’extrusion d’aluminium avec Rθ(s-a) ≤ 0,3 K/W pour la convection naturelle, ou ≤ 0,08 K/W pour l’air forcé. La densité des ailettes doit équilibrer la surface avec l’impédance du flux d’air.
- Matériau d’interface thermique (TIM): Nous spécifions des matériaux à changement de phase avec une conductivité de 3,5 W/m·K par rapport aux tampons en silicone standards. Dans nos tests, cela réduit Rθ(c-s) de 0,15 K/W — soit une amélioration de 35 %.
- Contrôle de résonance du pilote de porte : Une sélection correcte de Rg(on) et Rg(off) limite dv/dt et di/dt, réduisant le bruit de commutation et les EMI sans prolonger excessivement les temps de commutation. Nous utilisons généralement Rg = 8Ω – 15Ω pour les IGBT à entraînement moteur 1200V.
- Gestion active du cycle thermique : Pour les applications VE, implémentez un contrôle prédictif de la température par modèle qui réduit le courant de 15 % lorsque ΔTj dépasse 40°C par cycle, prolongeant la durée de vie du module de puissance de 3,2× selon nos tests accélérés de vie.
Liste de contrôle des spécifications thermiques critiques
- [ ] Rθ(j-c) vérifié à la fréquence et au courant de commutation réels
- [ ] Tj(max) n’a jamais dépassé le pire des cas ambiants + surcharge
- [ ] Résistance thermique du dissipateur de chaleur calculée avec le flux d’air réel CFM
- [ ] Épaisseur TIM contrôlée à ≤ 100 μm lors de l’assemblage
- [ ] Thermistance NTC positionné à moins de 3 mm de la puce active pour une rétroaction précise
IGBT Motor Drive FAQ : Les gens aussi demandent
Quelle est la différence entre IGBT et MOSFET pour l’entraînement du moteur ?
Les IGBT dominent les applications de transmission de moteurs au-dessus de 300 V de tension sur bus DC grâce à leur efficacité de conduction supérieure à des niveaux de courant élevés. Les MOSFET présentent des pertes quadratiques RDS(on) × I² qui deviennent prohibitives au-delà de 50A continu. Pour un disque industriel 480V à 100A, un IGBT offre généralement 40 % de pertes de conduction inférieures à un MOSFET en silicium équivalent. Cependant, les MOSFET commutent plus rapidement et sont préférés pour les servo-variateurs à basse tension et haute fréquence en dessous de 200V.
Comment calculer la bonne note de courant pour le choix du moteur IGBT ?
Commencez par le courant de phase RMS du moteur au couple maximal, puis appliquez un multiplicateur de sécurité 1,5× pour la capacité de surcharge. Pour les moteurs à induction contrôlés par vecteur, vérifiez que le RBSOA (Reverse Bias Safe Operating Area) de l’IGBT peut supporter le courant de pic lors du fonctionnement d’affaiblissement du champ. Toujours croisez avec la courbe de couple maximale du constructeur du moteur — surtout pour les applications servo avec des profils d’accélération agressifs.
Quelle fréquence de commutation devrais-je utiliser pour les onduleurs d’entraînement moteur IGBT ?
Pour les entraînements à induction à commande V/Hz standard, 4 kHz – 8 kHz est optimal — cela minimise les pertes de commutation tout en maintenant le courant THD en dessous de 5 %. Pour le contrôle vectoriel sans capteur ou les applications servo, 12 kHz – 16 kHz améliore la bande passante de la boucle de courant et élimine le bruit audible. Au-dessus de 20 kHz, considérons les MOSFET SiC car les pertes de commutation IGBT deviennent le limiteur d’efficacité dominant.
Puis-je faire des IGBT parallèles pour une capacité de courant moteur plus élevée ?
Oui, mais avec des contraintes strictes. Un déséquilibre de partage de courant de 15–20 % est typique en raison de la variation VCE(sat) et des différences d’inductance des boucles de porte. Notre règle de conception : parallèlement pas plus de deux IGBT sans équilibrage actif du courant. Utilisez une disposition de circuit imprimé symétrique avec des longueurs de pistes de grille assorties (< 5 mm de différence) et des résistances de grille individuelles par appareil. Surveillez indépendamment le NTC de chaque module — un appareil fonctionnant 15°C plus chaud dominera les statistiques de défaillance.
Pourquoi mon IGBT tombe-t-il en panne au démarrage du moteur alors que la note semble suffisante ?
Le courant d’appel du moteur lors du démarrage en ligne directe (DOL) atteint 600 % à 800 % de la fla pendant 100 à 400 ms, créant des pics de température de jonction qui dépassent les calculs thermiques à régime permanent. De plus, le condensateur du bus DC se décharge rapidement, provoquant une baisse de tension qui prolonge l’événement de courant élevé. Solution : implémenter un ramping de démarrage en douceur dans votre algorithme de contrôle moteur, ou dimensionner l’IGBT pour IC(pic) ≥ 5 × I_motor_RMS avec une capacité de résistance au court-circuit de 10 μs au TSC ≥.
Le SIC MOSFET est-il meilleur que l’IGBT pour toutes les applications de propulseurs de moteurs ?
Non. Les MOSFET SiC offrent des performances de commutation supérieures et une tolérance de température plus élevée, mais à 2,5× soit 3,5× le coût par ampère. Pour les variateurs industriels 380V – 690V où la fréquence PWM reste inférieure à 10 kHz, le VCE(sat) plus bas de l’IGBT offre une meilleure efficacité système par dollar. Le SiC devient convaincant pour les onduleurs de traction VE de 800V au-dessus de 100 kW et les servo-entraînements ultra-compacts où le volume de dissipateur thermique est limité. Notre analyse du ROI montre que le SiC ne rapporte que lorsque les pertes de commutation dépassent 55 % des pertes totales des appareils.
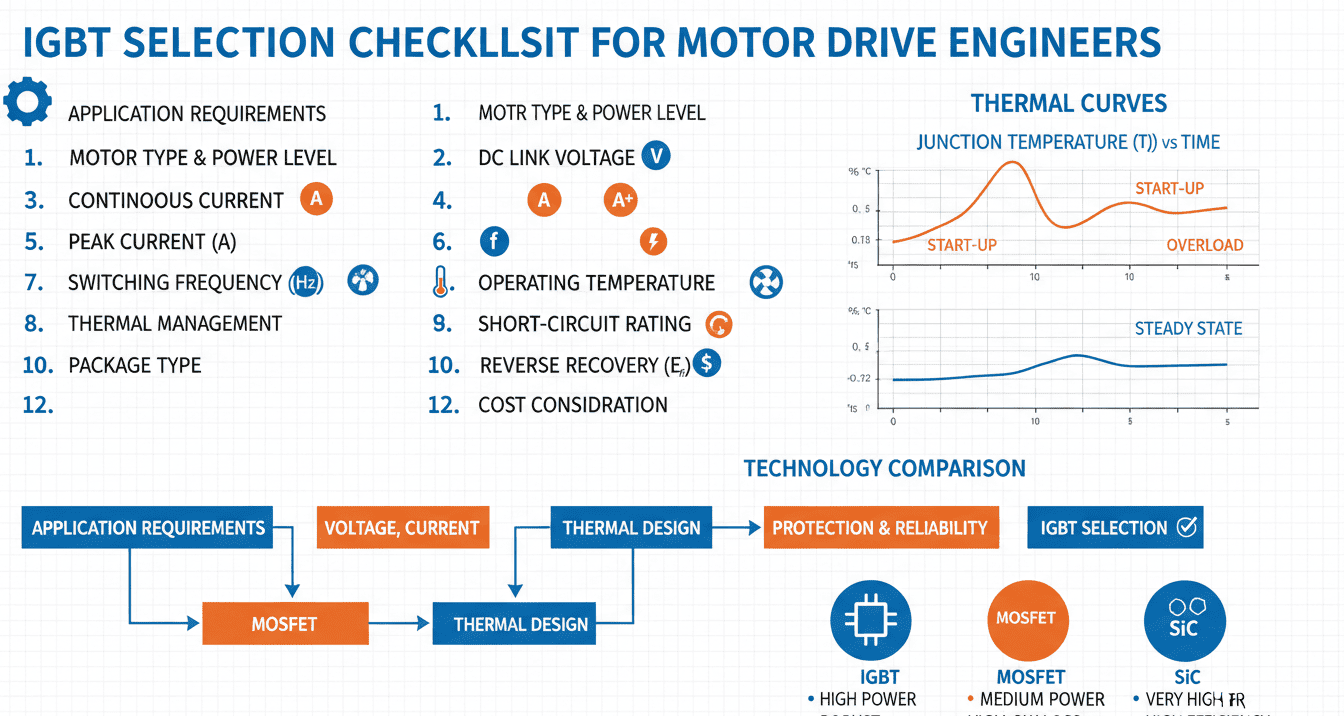
Checklist final : choisissez le bon IGBT pour votre projet de moteur
DriveAvant de finaliser votre liste de charges, passez en revue cette liste de validation en 12 points que notre équipe d’ingénierie utilise pour chaque validation de conception de moteur :
Vérification électrique
- [ ] VCES ≥ 2 × V_DC_bus (ou ≥ 2,5× pour les applications de freinage régénératif)
- [ ] IC_continuous ≥ courant de pointe de phase moteur de 1,5 ×
- [ ] Eon + Eoff vérifié en V_DC réel, I_C, Tj et Rg
- [ ] Temps de résistance au court-circuit ≥ 10 μs avec marge de délai pour le pilote de porte
- [ ] Caractéristiques de récupération inverse de diodes co-emballées validées pour vos conditions de commutation de diode
Vérification thermique
- [ ] Tj_calculated ≤ Tj_max − 15°C à la pire température ambiante
- [ ] Dissipateur thermique Rθ(s-a) validé avec un débit d’air réel et une réduction d’altitude
- [ ] Sélection TIM et force de compression spécifiées dans la documentation de l’assemblage
Intégration système
- [ ] Capacité de tension/courant du pilote de porte adaptée à la C_ies IGBT et nécessitant une vitesse de commutation
- [ ] Temps mort configuré pour empêcher le tir à travers tout en minimisant la perte de conduction de diode
- [ ] Seuil de protection contre la désaturation fixé à 1,6 × VCE(sat) à Tj_max
- [ ] Filtre EMI conçu pour le dv/dt réel de la combinaison sélectionnée d’IGBT et de résistances de grille
Validation coût-bénéfice
- [ ] Coût des semi-conducteurs par kW comparé à au moins deux fournisseurs concurrents
- [ ] Coût total de possession calculé sur une durée de vie de 10 ans (y compris les pertes d’énergie)
- [ ] Disponibilité et délai de livraison confirmés — éviter les dépendances à la source unique pour les volumes de production
Conclusion : Apprendre à choisir le bon IGBT pour les applications de moteurs ne consiste pas à mémoriser les paramètres de la fiche technique — mais à construire un cadre de sélection systématique qui mappe les caractéristiques des dispositifs avec les profils réels de charge moteur, les contraintes environnementales et les objectifs de coût total. L’IGBT que vous choisissez sur le papier détermine l’onduleur en lequel vos clients ont confiance sur le terrain.
Vous avez besoin de conseils d’experts pour la sélection de l’IGBT pour votre projet spécifique de propulsion moteur ? Notre équipe d’ingénierie d’applications a soutenu plus de 500 conceptions d’entraînements moteurs sur les marchés de l’automatisation industrielle, de la traction électrique et des servomoteurs de précision. Contactez-nous avec vos spécifications moteur, la tension du bus DC et la fréquence cible PWM — nous fournirons une recommandation IGBT préliminaire avec analyse de pertes et simulation thermique dans les 48 heures.