

Circuits imprimés de drones : composants, architecture et technologie avancée de contrôle de vol
Les cartes électroniques de drones — communément appelées PCB contrôleurs de vol—forment l’architecture électronique centrale des véhicules aériens sans pilote (UAV) modernes. Ces cartes intègrent la détection, le traitement du signal, le contrôle moteur, la gestion de l’énergie et la communication sans fil dans un système embarqué compact.
D’un point de vue ingénierie des systèmes, le circuit imprimé du drone fonctionne comme une plateforme de contrôle en temps réel qui traite les données provenant de capteurs inertiels, interprète les commandes du pilote, exécute des algorithmes de stabilisation et distribue l’énergie aux sous-systèmes de propulsion.
Cet article propose une analyse technique d’ingénierie des cartes électroniques de drones, couvrant l’architecture, les pipelines de traitement du signal, la conception des sous-systèmes, les interfaces de communication, les modes de défaillance typiques et les tendances émergentes dans l’électronique UAV et la fabrication de PCB.
Table des matières
- [1. Qu’est-ce qu’une carte de circuit de drone ?](#1-qu’est-un-circuit-de drone)
- [2. Comment fonctionne une carte de circuit de drone] (#2-comment-un-circuit-board-de drone fonctionne)
- [3. Composants principaux d’un contrôleur de vol de drone] (#3-composantes-centrales-de-contrôleur-d’un drone-contrôleur)
- [4. Types de circuits imprimés utilisés dans les drones] (#4-types-de-cartes-de-circuits-utilisés-dans-les les drones)
- [5. Pipeline de traitement du signal dans l’électronique des drones] (#5-pipeline-de traitement du signal-dans-drone-électronique)
- [6. Distribution et gestion de l’énergie] (#6-distribution-et-gestion-d’énergie)
- [7. Systèmes de communication sur circuits de drones] (#7-communications-systems-on-drone-circuits-boards)
- [8. Défaillances courantes des circuits imprimés de drones et dépannage (#8-défaillances-PCB-et dépannage des drones communs)
- [9. Réparer une carte de circuit de drone endommagée] (#9-réparer-un-circuit-de drone endommagé)
- [10. Mise à niveau et modification des circuits imprimés de drones] (#10-upgrade-and-modifiant-drones-circuits-boards)
- [11. Tendances émergentes en électronique de drones et technologie des PCB] (#11-tendances-émergentes-in-électronique-et-technologie-PCB)
- 12. FAQ
- 13. Conclusion
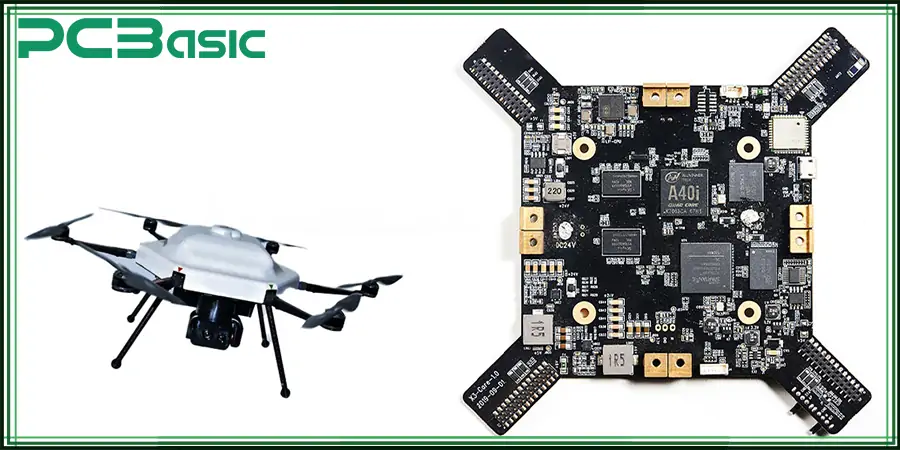
1. Qu’est-ce qu’une carte de circuit électronique pour drone ?
Une carte de circuit drone est le principal système électronique embarqué responsable du contrôle de vol, de la navigation, du traitement du signal et de la coordination des sous-systèmes dans un UAV.
Dans la plupart des drones modernes, cette carte est appelée contrôleur de vol (FC). Il intègre plusieurs sous-systèmes électroniques, notamment :
- Microcontrôleur ou processeur embarqué
- Unité de mesure inertielle (IMU)
- Circuits de régulation de puissance
- Interfaces de contrôle moteur
- Modules de communication
- Interfaces de capteurs périphériques
Du point de vue de l’architecture système, le contrôleur de vol agit comme un système de contrôle en boucle fermé. Il mesure constamment l’état physique du drone (position, vitesse, orientation) et ajuste la puissance des moteurs pour maintenir un vol stable.
2. Comment fonctionne une carte de circuit imprimé pour drone
Un contrôleur de vol de drone fonctionne via une boucle de contrôle de rétroaction en temps réel. Cette boucle fonctionne généralement entre 500 Hz et 8 kHz, selon le firmware et les capacités matérielles.
Étapes de boucle de contrôle
- Acquisition d’entrées
- Fusion de capteurs
- Traitement par algorithme de contrôle
- Production de puissance moteur
- Correction par rétroaction
Fusion de capteurs
Le contrôleur collecte des données de plusieurs capteurs :
- Gyroscope
- Accéléromètre
- Magnétomètre
- Baromètre
- Module GPS
Ces entrées sont fusionnées à l’aide d’algorithmes tels que :
- Filtres de Kalman
- Filtres complémentaires
- Filtres Mahony / Madgwick
Ce processus génère une estimation précise de l'attitude et de la position du drone.
Contrôle de vol PID
La plupart des drones reposent sur des boucles de contrôle PID :
[ Sortie = K_p \cdot e + K_i \int e,dt + K_d \frac{de}{dt} ]
Où :
- (e) = erreur entre l’orientation désirée et mesurée
- (K_p) = gain proportionnel
- (K_i) = gain intégral
- (K_d) = gain de dérivée
Ces paramètres régulent la rapidité avec laquelle le drone corrige ses mouvements.
3. Composants principaux d’un contrôleur de vol de drone
Une carte de circuit drone intègre plusieurs modules fonctionnels.
Microcontrôleur / Processeur
Le processeur est le noyau de calcul du drone.
Les familles MCU courantes incluent :
- Série STM32
- Processeurs ARM Cortex-M
Responsabilités clés :
- Exécution du firmware de vol
- Exécution d’algorithmes de contrôle
- Gestion de la fusion des capteurs
- Gestion des protocoles de communication
Unité de mesure inertielle (IMU)
L’IMU intègre généralement :
- Gyroscope à 3 axes
- Accéléromètre à 3 axes
Ces capteurs mesurent la vitesse angulaire et l’accélération linéaire.
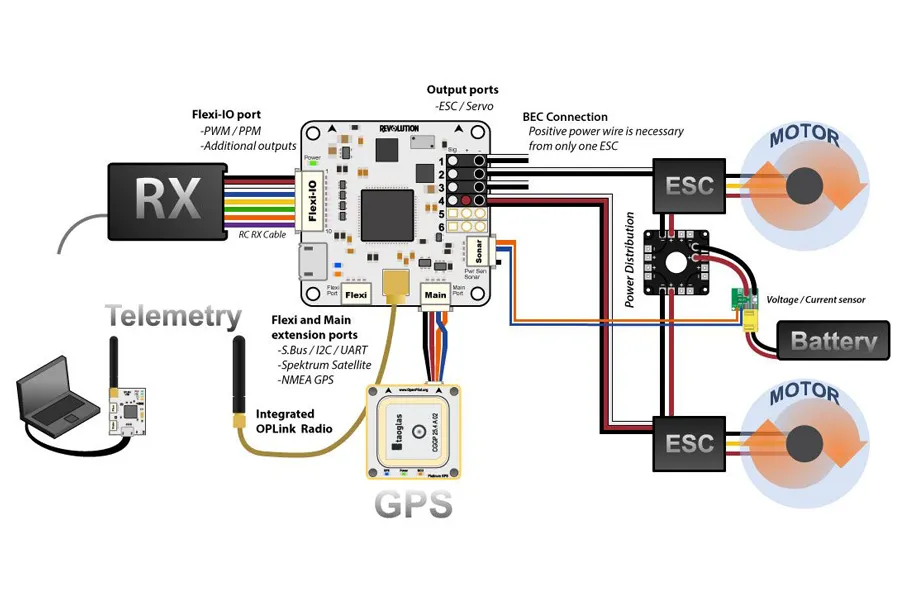
Interfaces de contrôle moteur
Les contrôleurs de vol envoient des signaux aux ESC (contrôleurs électroniques de vitesse) via :
- PWM
- OneShot
- Protocoles numériques DShot
Circuits de régulation de la puissance
Les régulateurs de tension convertissent la tension de la batterie en rails stables :
- Rail 5V
- Rail logique 3,3V
Interfaces périphériques
Les interfaces typiques incluent :
- UART
- SPI
- I²C
- Bus CAN (drones avancés)
4. Types de cartes électroniques utilisées dans les drones
L’électronique des drones est généralement divisée en plusieurs modules PCB spécialisés.
Carte du contrôleur de vol
Anses :
- traitement des capteurs
- algorithmes de contrôle
- stabilisation en vol
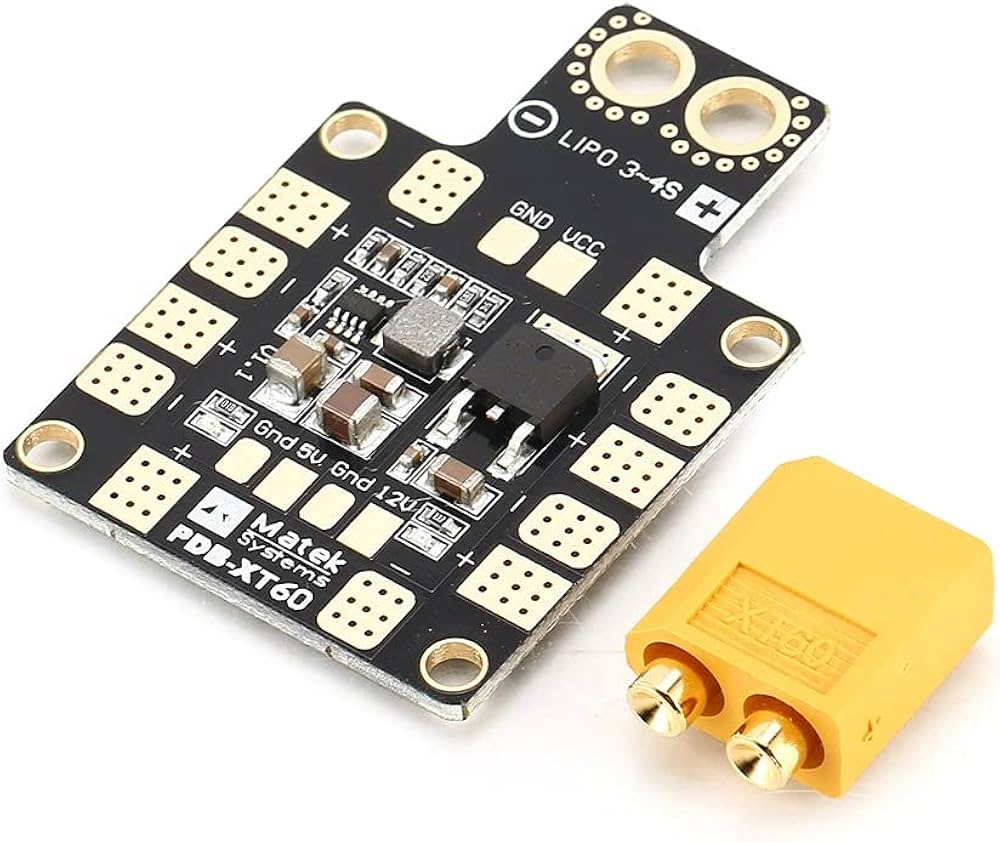
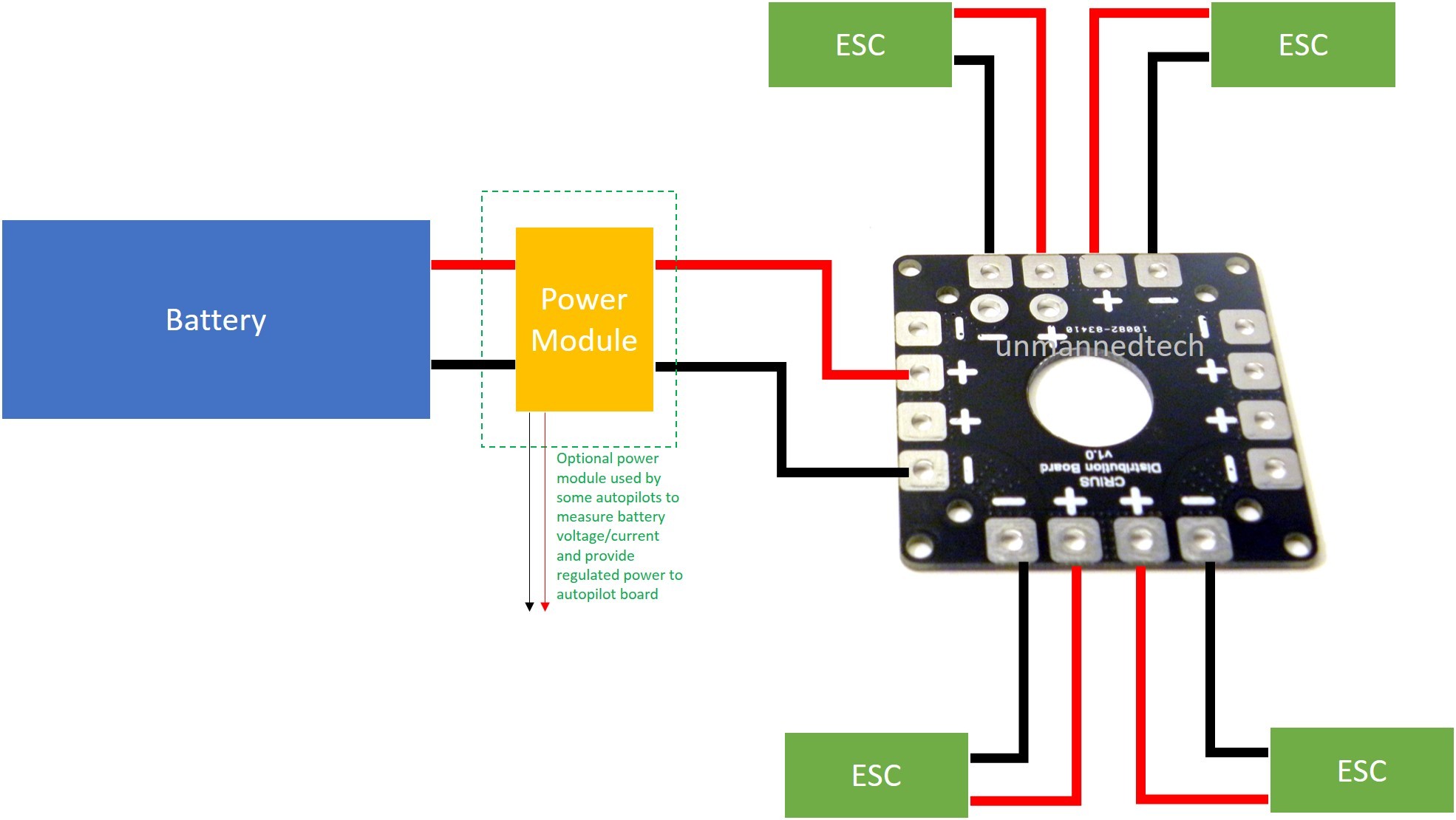
Tableau de distribution d’énergie (PDB)
Distribue l’énergie des batteries à :
- ESC
- contrôleur de vol
- électronique de charge utile
Tableau ESC
Les ESC convertissent l’alimentation des batteries DC en signaux d’entraînement moteur triphasé.
Panneau GPS
Offre :
- suivi de position
- navigation
- fonctionnalité de retour à la maison
Carte vidéo / caméra
Anses :
- Capture d’images
- Transmission FPV
- Superpositions de télémétrie
5. Pipeline de traitement du signal dans l’électronique des drones
Le traitement du signal à l’intérieur d’un contrôleur de vol de drone suit une chaîne structurée.
1. Réception du signal
Les entrées comprennent :
- Signaux de télécommande
- Données IMU
- Données GPS
- Signaux de télémétrie
2. Fusion de capteurs
Les signaux bruts des capteurs sont bruyants et doivent être filtrés.
Les techniques de filtrage courantes incluent :
- Filtres passe-bas
- Filtres de Kalman
- Filtres complémentaires
3. Exécution de l’algorithme de contrôle
Le firmware de contrôle calcule les ajustements de poussée moteur souhaités.
4. Puissance du moteur
Les commandes sont transmises aux ESC via des signaux numériques ou PWM.
5. Rétroaction de stabilisation
La boucle se répète en continu pour maintenir une dynamique de vol stable.
6. Distribution et gestion de l’énergie
L’architecture de l’alimentation est essentielle à la fiabilité des drones.
Source de batterie
La plupart des drones utilisent batteries LiPo allant de :
- 2S (7,4V)
- 4S (14,8V)
- 6S (22,2V)
Régulation de la tension
Les convertisseurs DC-DC génèrent des tensions stables :
- 5V pour les systèmes logiques
- 3,3V pour les capteurs
Distribution actuelle
Les bus d’alimentation fournissent de l’énergie à :
- moteurs
- contrôleurs
- électronique de charge utile
La conception appropriée d’un circuit imprimé doit prendre en compte :
- largeur de trace en cuivre
- dissipation thermique
- capacité actuelle
7. Systèmes de communication sur les cartes de circuits de drones
Les circuits imprimés de drones prennent en charge plusieurs sous-systèmes de communication.
Lien de télécommande
Les protocoles radio typiques incluent :
- SBUS
- CRSF
- DSMX
Ces commandes transmettent les commandes du pilote au contrôleur de vol.
Communication GPS
Les modules GPS se connectent via UART.
Les données comprennent :
- latitude
- longitude
- altitude
- vitesse
Télémétrie
La télémétrie envoie des données en temps réel à la station au sol :
- tension de batterie
- mode de vol
- altitude
- intensité du signal
Transmission vidéo
Les drones FPV transmettent la vidéo via :
- analogique 5,8 GHz
- systèmes HD numériques
8. Défaillances courantes des circuits imprimés sur drones et dépannage
| Problème | Cause possible | Solution d’ingénierie |
|---|---|---|
| Drone qui ne s’allume pas | Défaillance de batterie ou de régulateur de tension | Vérifiez la tension de la batterie et les rails d’alimentation |
| Composants en surchauffe | Court-circuit ou courant excessif | Inspectez les pistes et le refroidissement du circuit imprimé |
| Vol instable | Dérive du capteur ou erreur d’étalonnage | Recalibrer les capteurs IMU |
| Signal faible | Problème d’antenne ou de récepteur | Vérifiez le câblage de l’antenne et du récepteur |
| Composants brûlés | ESC ou dégâts liés à la surtension | électriqueRemplacer les composants endommagés |
| Défaillance moteur | Ligne de signal ESC coupée | Vérifiez les connexions ESC |
9. Réparer une carte de circuit de drone endommagée
La réparation d’un circuit imprimé de drone nécessite des diagnostics minutieux.
1. Inspection visuelle
Vérifier :
- CI brûlés
- condensateurs endommagés
- connecteurs cassés
2. Nettoyage
Utilisation :
- alcool isopropylique
- brosses antistatiques
3. Essais électriques
Circuits d’essai avec :
- Multimètre
- oscilloscope
4. Remplacement des composants
Remplacer les pièces défectueuses telles que :
- Régulateurs
- condensateurs
- connecteurs
5. Réparation des joints de soudure
Les soudures froides peuvent provoquer des défauts intermittents.
6. Essais fonctionnels
La vérification finale doit inclure :
- test moteur
- calibration des capteurs
- essais en vol
10. Mise à niveau et modification des circuits imprimés de drones
Les utilisateurs avancés améliorent souvent l’électronique des drones.
Les modifications courantes incluent :
- installation de microcontrôleurs plus rapides
- ajout de capteurs de débit optiques
- intégrer des modules LiDAR
- mise à niveau des protocoles ESC
- ajout de modules de télémétrie longue portée
Les avantages incluent :
- amélioration de la stabilité en vol
- une autonomie de vol plus longue
- meilleure capacité de navigation
Cependant, les modifications nécessitent une attention particulière à :
- consommation électrique
- Compatibilité du firmware
- Limitations de la disposition des PCB
11. Tendances émergentes dans l’électronique des drones et la technologie des circuits imprimés
L’électronique des drones évolue rapidement.
Conception de PCB à haute densité
Les cartes UAV modernes utilisent :
- PCB multi-couches
- Technologie IDH
- composants à pas fin
Contrôleurs de vol activés par IA
L’intelligence artificielle permet :
- évitement des obstacles
- navigation autonome
- suivi d’objets
Communication 5G
La 5G améliore :
- diffusion vidéo en temps réel
- télécommande à faible latence
Matériaux avancés
De nouveaux matériaux pour PCB s’améliorent :
- gestion thermique
- intégrité du signal
Emballage électronique 3D
Les conceptions de PCB empilées réduisent la taille et le poids.
12. FAQ
Que fait un contrôleur de vol drone ?
Un contrôleur de vol traite les données des capteurs et les commandes du pilote pour contrôler la vitesse du moteur, permettant au drone de maintenir son équilibre et de naviguer avec précision.
Pourquoi les capteurs IMU sont-ils importants dans les drones ?
Les capteurs IMU mesurent le mouvement et l’orientation, permettant au contrôleur de stabiliser l’aéronef pendant le vol.
Un drone peut-il fonctionner sans GPS ?
Oui. De nombreux drones peuvent voler uniquement en utilisant les capteurs IMU, bien que le GPS améliore la navigation et permette des fonctions autonomes.
Qu’est-ce qui cause le plus souvent la défaillance des circuits imprimés de drone ?
Les causes courantes incluent :
- surtensions électriques
- dommages dus à l’humidité
- surchauffe
- impact mécanique
13. Conclusion
Les circuits imprimés de drones représentent l'intelligence centrale et l’infrastructure de contrôle des systèmes UAV modernes. En intégrant la détection, les algorithmes de contrôle, la gestion de l’énergie et les interfaces de communication, le contrôleur de vol permet un vol stable et réactif.
À mesure que les applications des UAV s’étendent — de la photographie aérienne à l’inspection industrielle et à la logistique autonome — l’électronique sous-jacente continue d’évoluer. Les avancées dans l'intégration de l’IA, la conception de circuits imprimés à haute densité et les technologies de communication à haute vitesse propulsent la prochaine génération de plateformes de drones, les rendant plus autonomes, efficaces et performantes que jamais.